
В
любой реальной CАУ
невозможно точное равенство задающего
воздействия g
и управляемой величины y.
Ошибку САУ при этом вычислим согласно
уравнению ошибки как разность этих
воздействий, т.е.:

Учитывая
историю переходных процессов, ошибку
можно представить в виде двух составляющих:
установившейся (статической) и переходной
(динамической):

В
линейных САУ установившаяся (статическая)
ошибка определяется частным решением
её дифференциального уравнения, а
переходная (динамическая) ошибка –
решением однородного дифференциального
уравнения.
Таким
образом, установившуюся ошибку САУ в
неподвижном состоянии называют
статической, а ошибку при переходных
режимах – динамической.
Текущая
ошибка отработки переменного сигнала
называется динамической ошибкой САУ.
Динамическая ошибка системы изменяется
с течением времени. Она зависит от
структуры, параметров и характера
изменения воздействий САУ.
38 Повышение качества и синтез линейных сау
В
системе регулирования по отклонению
установившаяся [ошибка имеет три
составляющие:

(5—24)
|
где
![]()
—
ошибка воспроизведения задающего
воздействия![]()
—
ошибка, вызываемая действием возмущений;![]()
—
ошибка чувствительного элемента,
измеряющего рассогласование
Как
было показано в гл. 4, установившаяся
ошибка может [быть представлена в виде
ряда (4.3). При этом коэффициенты [ошибок
воспроизведения
![]()
вычисляют
по передаточной функции
![]()
замкнутой
системы для ошибки воспроизведения
Нужно,
заметить, что в статической системе

где
k
—
передаточный коэффициент разомкнутой
системна;![]()
—
передаточный коэффициент прямой, цепи
от возмущения
![]()
до
выходной координаты у.
Следовательно,
уменьшение установившейся ошибки
постоянных значениях задающего
воздействия и возмущения достигается
увеличением передаточного коэффициента
разомкнутой системы. Однако с
увеличением статической точности в
большинстве случаев уменьшаются запасы
устойчивости I
и при значительном увеличении k
система
становится неустойчивой.
Противоречие
между статической точностью и
устойчивостью проиллюстрировано на
рис. 5.9, где сплошными линиями показаны
логарифмические частотные характеристики
разомкнутой системы с передаточной
функцией

при
![]()
Если
передаточный коэффициент увеличить
до k
— 60,
то ЛАЧХ принимает положение, показанное
пунктиром. Частота среза увеличилась
и запас устойчивости по фазе уменьшился
с
![]()
до
![]()
Столь
малый запас по фазе совершенно недопустим.
При
повышении статической точности путем
увеличения передаточного коэффициента
k
разомкнутой
системы необходимы мероприятия для
обеспечения достаточного запаса
устойчивости. Они будут рассмотрены
в следующем параграфе. Возможно,
вообще говоря, создание такой структуры
системы, которая допускает неограниченное
увеличение передаточного коэффициента
k
разомкнутой
цепи 121.
Другой
путь повышения статической точности
— обеспечение астатизма. В астатической
системе младшие коэффициенты ошибки
имеют следующие значения:

где
k0
—
передаточный коэффициент разомкнутой
системы называемый в данном случае
добротностью системы по скорости
(или коэффициентом добротности
по скорости). Таким образом, в астатической
системе отсутствует установившаяся
ошибка от постоянного задающего
воздействия и постоянных возмущений.
Для
астатизма относительно возмущения
интегрирующее звено должно быть введено
до точки, в которой приложено возмущение
(рис. 5.10).
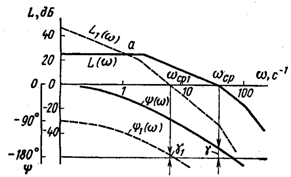
Влияние
интегрирующего звена на динамические
свойства системы
где
сплошными линиями показаны
логарифмические частотные характеристики
системы с передаточной функцией
(5.26). При введении в разомкнутую цепь
этой системы интегрирующего звена
характеристики принимают положение,
показанное пунктиром. Фазочастотная
характеристика переместилась вниз
на —90°, а амплитудно-частотная
характеристика повернулась вокруг
точки а
по
направлению часовой стрелки . В
результате запас устойчивости по фазе
уменьшился с
![]()
до
недопустимо малого значения
![]()
Система
остается устойчивой, но переходный
процесс будет сильно колебательным.
Кроме того, уменьшилась частота среза
и переходные процессы будут более
продолжительными.
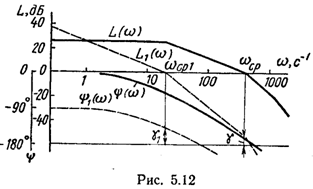
Однако
в других ситуациях введение интегрирующего
звена может не только не ухудшить, а
даже улучшить динамические свойства
системы. Пусть, например, постоянные
времени системы с передаточной функцией
(5.26) имеют следующие значения: Т1
=
= 0,05 с, Т2
=
0,0025 с и T3
= 0,001 с. Логарифмические частотные
характеристики разомкнутой системы
показаны
При
введении интегрирующего звена
характеристики принимают положение,
показанное пунктирными линиями. В
данном случае интегрирующее звено
уменьшило частоту среза, но запас
устойчивости по фазе увеличился с
![]()
|до
![]()
.
Хотя быстродействие системы
уменьшилось, но уменьшилась и
колебательность.
Таким
образом, при повышении статической
точности путем введения интегрирующего
звена могут оказаться необходимыми
мероприятия по сохранению запасов
устойчивости САУ.
Значительно
лучшие результаты получают при получении
астатизма с помощью изодромного звена,
т. е- звена с передаточной функцией
![]()
![]()
постоянная
времени изодрома.
Если
постоянная времени
![]()
достаточно
велика, то запас устойчивости может
быть сохранен неизменным. Уменьшение
передаточного коэффициента разомкнутой
системы должно быть скомпенсировано
увеличением коэффициента усиления
усилителя. Следует учитывать, что при
большом значении
могут
увеличиться старшие коэффициенты
ошибки.
Астатизм
САУ относительно задающего воздействия
можно обеспечить более простыми
способами: неединичной обратной
связью и масштабированием [3).
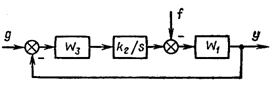
Структурная
схема системы с неединичной обратной
связью показана на рис. 5.13, а.
В
установившемся режиме регулируемая
координата связана с постоянным задающим
воздействием соотношением

(5.27)
где
kn
—
передаточный коэффициент прямой цепи
системы.
Если
выполнить основную обратную связь
системы с коэффициентом
![]()
и
система относительно задающего
воздействия будет астатической.Структурная
схема системы масштабированием входной
(величины показана на рис. 5.13, б.
Ее
особенность — наличие
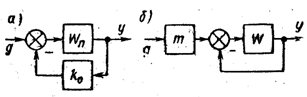
усилительного
звена с передаточным коэффициентом
m
на входе. В установившемся режиме
![]()
где
k
—
передаточный коэффициент разомкнутой
системы.
При
/л = 1 -f-
УЬ
получаем
у
= g0
и
система является астатической
относительно задающего воздействия.
Недостаток
этих способов в том, что астатизм
обеспечивается только при сохранении
указанных соотношений между передаточными
коэффициентами. Неточное определение
передаточного коэффициента какого-либо
элемента системы и его изменение в
процессе эксплуатации ведут к появлению
статической ошибки. Астатизм,
достигнутый введением интегрирующего
или изодромного звена, сохраняется и
при изменении параметров системы.
Однако нужно иметь в виду, что введение
двух интегрирующих звеньев в систему,
состоящую из усилительных, апериодических
и колебательных звеньев, сделает ее
структурно-неустойчивой. Возможно
обеспечение астатизма и более высокого
порядка. При этом из-за введения большого
числа интегрирующих или изодромных
звеньев и мероприятий, обеспечивающих
требуемые динамические свойства,
структура САУ значительно усложняется.
Компенсация
внешнего воздействия (обеспечение
инвариантности). Рассмотренные выше
способы улучшения статических и
динамических свойств системы связаны
лишь с изменениями параметров
элементов САУ и структуры ее отдельных
участков, но при этом не затрагивают
принципа действия системы.
Помимо
принципа регулирования по отклонению
существует принцип регулирования
по внешнему воздействию. Значительный
эффект дает их одновременное использование.
В этом случае системы называются
комбинированными. Кроме замкнутого
контура они имеют дополнительную
цепь влияния внешнего воздействия —
возмущения или задающего.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
§ 19.1. Статические и скоростные ошибки автоколебательных систем
В предыдущих главах исследовались симметричные автоколебания как результат свободного движения системы (т. е. без внешнего воздействия) при симметричных нелинейностях. Однако, как будет показано, важное практическое значение имеет также рассмотрение несимметричных автоколебаний.
Несимметрия автоколебаний может вызываться различными причинами;
1) несимметричностью нелинейной характеристики как при наличии, так и при отсутствии внешних воздействий;
2) наличием постоянного или медленно меняющегося внешнего воздействия при симметричных нелинейностях;
3) наличием постоянной или медленно меняющейся скорости изменения внешнего воздействия при симметричных нелинейностях (для тех случаев, когда постоянное воздействие не вызывает смещения центра колебаний; обычно это имеет место в следящих системах и вообще в астатических системах).
В самом деле, если имеется несимметричная нелинейная характеристика (например, рис. 19.1, а, б), то даже при симметричных колебаниях переменной  возникают несимметричные по амплитуде колебания переменной
возникают несимметричные по амплитуде колебания переменной  (рис. 19.1, б).
(рис. 19.1, б).

Рис. 19.1.
Если же нелинейность симметрична (например, рис. 19.2, а, б), то при наличии постоянного внешнего воздействия (или в астатических системах при наличии постоянной скорости изменения внешнего
воздействия) смещается центр колебаний переменной  вследствие чего колебания переменной
вследствие чего колебания переменной  становятся несимметричными по амплитуде и по времени (рис. 19.2, а) или только по времени (рис. 19.2, б).
становятся несимметричными по амплитуде и по времени (рис. 19.2, а) или только по времени (рис. 19.2, б).

Рис. 19.2.
Пусть задана автоматическая система, динамика которой описывается уравнением

В данном параграфе будем считать  для статических систем или же
для статических систем или же  для астатических систем. Астатической системой называется такая, в которой многочлен
для астатических систем. Астатической системой называется такая, в которой многочлен  имеет общий множитель
имеет общий множитель  , т. е.
, т. е.  .
.
Поэтому запишем уравнение (19.1) в виде

где соответственно

При этом решение нелинейного уравнения (19.1), в отличие от прежнего (§ 18.2), ищется в форме

причем  а,
а,  являются неизвестными постоянными.
являются неизвестными постоянными.
С учетом величины смещения  первые члены разложения в ряд Фурье вместо (18.6) и (18.7) следует записать в виде
первые члены разложения в ряд Фурье вместо (18.6) и (18.7) следует записать в виде

где при обозначении 

Отсюда видно, что в общем случае все три коэффициента являются функциями трех неизвестных:

В частных случаях эти зависимости могут быть более простыми.
Подстановка выражений (19.4) и (19.5) в заданное дифференциальное уравнение (19.1) с учетом свойства фильтра (см. § 18.2) дает

Это уравнение разбивается на два:

При таком разделении сохраняются существенно нелинейные свойства и отсутствие суперпозиции решений, так как остается нелинейная взаимосвязь обоих уравнений через соотношения (19.7).
Можно предложить два метода решения задачи.
Первый метод состоит в следующем. Уравнение (19.9) совпадает с прежним уравнением (18.33); отличие состоит лишь в том, что теперь коэффициенты q и  согласно (19.7) зависят не только от а и
согласно (19.7) зависят не только от а и  , но и от смещения
, но и от смещения  Поэтому, написав как прежде, характеристическое уравнение
Поэтому, написав как прежде, характеристическое уравнение

заменив  на
на  ивыделив вещественную и мнимую части, в отличие от (18.36), получим здесь два алгебраических уравнения с тремя неизвестными:
ивыделив вещественную и мнимую части, в отличие от (18.36), получим здесь два алгебраических уравнения с тремя неизвестными:

Эти уравнения дают возможность определить амплитуду  и частоту
и частоту  автоколебаний как функции постоянной составляющей
автоколебаний как функции постоянной составляющей 

Для решения этой задачи можно применять любой из способов, описанных в § 18.2, в зависимости от того, какой из них лучше подходит к условиям заданной конкретной задачи. Таким же способом можно определить зависимость а и  не только от
не только от  но и от параметров системы с целью выбора последних. Что касается тех способов § 18.2, где используются графики
но и от параметров системы с целью выбора последних. Что касается тех способов § 18.2, где используются графики  и
и  , то здесь их необходимо строить в виде серии кривых при разных постоянных значениях
, то здесь их необходимо строить в виде серии кривых при разных постоянных значениях  (рис. 19.3).
(рис. 19.3).
После того как из уравнений (19.11) определены зависимости (19.12), можно, воспользовавшись первым из выражений (19.7), найти функцию смещения

Подставив ее в (19.8), получим алгебраическое уравнение

с одной неизвестной  которая отсюда и определяется. Чаще всего это уравнение относительно
которая отсюда и определяется. Чаще всего это уравнение относительно  является трансцендентным и решается графически. Затем согласно (19.12) определяются также амплитуда
является трансцендентным и решается графически. Затем согласно (19.12) определяются также амплитуда  и частота
и частота 
Указанную зависимость (19.12) амплитуды и частоты автоколебаний от величины смещения центра колебаний, характерную именно для нелинейных систем (в линейных системах смещение центра колебаний не играет роли), надо всегда иметь в виду.

Рис. 19.3.
При одних нелинейностях она может быть весьма существенной, при других — менее существенной.
Второй метод решения той же задачи состоит, наоборот, в том, что сначала решается уравнение (19.8), где согласно (19.7) будет  или часто
или часто  . Решение получает вид
. Решение получает вид

Это решение подставляется затем в уравнения (19.11), которые, таким образом, буду! содержать только две неизвестные:  Определив последние (по любому из способов § 18.2), вычисляем потом по (19.15) и величину
Определив последние (по любому из способов § 18.2), вычисляем потом по (19.15) и величину  которая будет в результате зависеть от формы нелинейности, от параметров системы и от внешнего воздействия
которая будет в результате зависеть от формы нелинейности, от параметров системы и от внешнего воздействия 
Величина  и является искомой статической или скоростной ошибкои соответственно для статической и астатической систем.
и является искомой статической или скоростной ошибкои соответственно для статической и астатической систем.
В тех случаях, когда передаточная функция линейной части системы  имеет нулевой корень в знаменателе (что часто бывает), т. е. когда
имеет нулевой корень в знаменателе (что часто бывает), т. е. когда  вместо (19.14) получаем уравнение
вместо (19.14) получаем уравнение

откуда определяется статическое отклонение или скоростная ошибка 
В случае, когда при отсутствии внешнего воздействия  определяются автоколебания в системе с несимметричной нелинейностью, т. е. нелинейностью
определяются автоколебания в системе с несимметричной нелинейностью, т. е. нелинейностью  или же
или же  для которой
для которой

вместо уравнения (19.8) получаем

Оно решается любым из тех же двух методов, описанных выше для уравнения (19.8). Одновременно согласно (19.11) определяются 
Если в этом случае знаменатель  передаточной функции линейной части системы имеет нулевой корень, то
передаточной функции линейной части системы имеет нулевой корень, то  и, следовательно, уравнение (19.18) с учетом (19.13) принимает вид
и, следовательно, уравнение (19.18) с учетом (19.13) принимает вид

откуда определяется  Это означает, что в указанных системах возникает такое смещение
Это означает, что в указанных системах возникает такое смещение  колебаний переменной х, которое ликвидирует свойственную данной нелинейности несимметрию колебаний переменной F (т. е. обеспечивается
колебаний переменной х, которое ликвидирует свойственную данной нелинейности несимметрию колебаний переменной F (т. е. обеспечивается  ), как показано, например, на рис. 19.4 в отличие от рис. 19.1, б.
), как показано, например, на рис. 19.4 в отличие от рис. 19.1, б.
Приведем пример исследования совместного влияния двух внешних воздействий, причем из дальнейшего будет видно, что, в отличие от линейных систем, здесь нельзя просто складывать статические ошибки от отдельно взятых в  ействий.
ействий.
Уравнения автоматической системы (рис. 19.5) заданы в виде

где  — простейшая симметричная релейная характеристика, показанная на рис. 19.5:
— простейшая симметричная релейная характеристика, показанная на рис. 19.5:

Чтобы воспользоваться выведенными выше общими формулами, надо сначала привести заданную систему уравнений (19.20) — (19.22) к одному уравнению типа (19.1).

Рис. 19.4.

Рис. 19.5.
В результате получаем

Пусть  является задающим воздействием, изменяющимся с постоянной скоростью:
является задающим воздействием, изменяющимся с постоянной скоростью:

которое требуется воспроизвести на выходе системы в виде  Допустим также, что второе внешнее воздействие
Допустим также, что второе внешнее воздействие  является возмущающим и имеет постоянную величину (например, постоянная нагрузка на выходном валу системы):
является возмущающим и имеет постоянную величину (например, постоянная нагрузка на выходном валу системы):

Его влияние требуется свести к минимуму. Найдем установившуюся ошибку на выходе системы. Правая часть уравнения (19.24) будет при этом постоянной, и установившееся решение для х с учетом автоколебаний следует искать
в виде

Гармоническая линеаризация нелинейности (19.23) при этом согласно (19.6) дает

В данной задаче согласно (19.24) уравнение (19.9) для периодических составляющих получит вид

а уравнение (19.8) для постоянных составляющих будет

где согласно (19 24)-(19.26)

Выше были указаны два метода решения задачи. Для иллюстрации обоих методов решим данную задачу каждым из них.
Согласно первому методу сначала решается уравнение (19.29) для определения зависимостей 
Характеристическое уравнение здесь будет

и уравнения (19.11) поэтому примут вид

Исключая отсюда  находим частоту автоколебаний
находим частоту автоколебаний

Частота  в данной задаче оказалась не зависящей от смещения
в данной задаче оказалась не зависящей от смещения  , а следовательно, и от величины внешнего воздействия. Затем, подставляя в первое из уравнений (19.33) выражение q из (19.28) и
, а следовательно, и от величины внешнего воздействия. Затем, подставляя в первое из уравнений (19.33) выражение q из (19.28) и  из (19.34), получаем биквадратное уравнение для отыскания зависимости амплитуды автоколебаний
из (19.34), получаем биквадратное уравнение для отыскания зависимости амплитуды автоколебаний  от смещения
от смещения 

где величина

представляет собой амплитуду автоколебаний в данной системе при отсутствии смещения (при  ). Отсюда
). Отсюда

Полученное выражение мояшо записать также в виде

если обозначить

Результат (19.37) или (19.38) и представляет собой искомую зависимость 
Далее, согласно первому методу решения задачи подставим полученное значение амплитуды  из (19.38) в выражение (19.28) для
из (19.38) в выражение (19.28) для  откуда с использованием (19.39) найдем функцию смещения
откуда с использованием (19.39) найдем функцию смещения

где А определяется через параметры системы формулой (19.36).
Подставив величину (19.40) в уравнение (19.30) для постоянных составляющих, с учетом (19.31) и (19.36) получим

Сравнивая это с формулой (19.39), видим, что для искусственно введенной ранее величины а можно записать следующее выражение:

Эта величина характеризует совокупность приложенных к системе внешних воздействий. Учитывая это, из формулы (19.38) находим амплитуду автоколебаний

Существенно то, что амплитуда автоколебаний зависит не только от параметров системы (см. (19.36)), но еще и от величины внешних воздействий. Эта зависимость нелинейная. В данном случае при увеличении внешних воздействий амплитуда уменьшается по закону косинуса, в то время как частота не зависит от внешних воздействий.
Из формулы (19.43) видно, что автоколебания существуют до тех пор, пока величины внешних воздействий удовлетворяют условию

При этом амплитуда автоколебаний изменяется в пределах 
Таков первый метод определения установившихся величин смещения  амплитуды
амплитуды  и частоты
и частоты  автоколебаний при наличии внешних воздействий.
автоколебаний при наличии внешних воздействий.
Проиллюстрируем также и второй метод. Согласно второму методу сначала решается уравнение (19.30). По (19.30) и первой из формул (19.28) находим

или, с учетом (19.31),

Для отыскания входящей сюда амплитуды а воспользуемся уравнением (19.29). Характеристическое уравнение для него будет (19.32), и уравнения (19.11) поэтому примут вид:

где согласно (19.28) и (19.45)

Исключая из уравнений (19.46) величину  находим частоту автоколебаний
находим частоту автоколебаний

Подставив найденные выражения q в первое из уравнений (19.46), найдем амплитуду автоколебаний

где величина

является амплитудой автоколебаний при отсутствии внешних воздействий (при 
Подставив найденное выражение амплитуды (19.49) в формулу (19.45) получим окончательно величину смещения

Как видно, второй метод в данной задаче приводит к тем же самым результатам значительно более коротким путем, чем первый, что очень важно для практических расчетов (принципиально же оба метода эквивалентны друг другу). По-видимому, большая простота второго метода будет иметь место и в большинстве других задач.
В этом втором методе, в отличие от первого, функция смещения  не определяется. Однако последняя может понадобиться в дальнейшем для других целей. Но ее тоже легко можно определить при использовании второго метода. Здесь величины
не определяется. Однако последняя может понадобиться в дальнейшем для других целей. Но ее тоже легко можно определить при использовании второго метода. Здесь величины  и их отношение выражены через величины внешних воздействий. Функция же смещения
и их отношение выражены через величины внешних воздействий. Функция же смещения  не должна содержать ни величин внешних воздействий, ни амплитуды
не должна содержать ни величин внешних воздействий, ни амплитуды  зависящей от них. Подставив значение квадратной скобки из (19.51) в (19.45), получим
зависящей от них. Подставив значение квадратной скобки из (19.51) в (19.45), получим

а подставив это в первую из формул (19.28), сразу получим искомую функцию смещения

где А выражается только через параметры системы согласно (19.50).
Важно отметить, что функция смещения  не зависит ни от числа внешних воздействий, ни от характера их изменения (если они постоянные или медленно меняющиеся), что наиболее наглядно было видно из первого метода решения задачи.
не зависит ни от числа внешних воздействий, ни от характера их изменения (если они постоянные или медленно меняющиеся), что наиболее наглядно было видно из первого метода решения задачи.
Итак, двумя разными методами определена величина смещения  автоколебаний на входе реле. Найдем теперь установившуюся ошибку на выходе системы
автоколебаний на входе реле. Найдем теперь установившуюся ошибку на выходе системы  Поскольку на выходе должно воспроизводиться внешнее воздействие
Поскольку на выходе должно воспроизводиться внешнее воздействие  то согласно рис. 19.5 и второму уравнению (19.20) ошибка данной системы выражается величиной
то согласно рис. 19.5 и второму уравнению (19.20) ошибка данной системы выражается величиной  установившееся решение для которой, следовательно, и надо искать. Выразив переменную
установившееся решение для которой, следовательно, и надо искать. Выразив переменную  через х, которая уже известна, из заданных уравнений системы (19.20) и (19.21) получаем
через х, которая уже известна, из заданных уравнений системы (19.20) и (19.21) получаем

Учитывая (19.25) и (19.27), перепишем данное уравнение в виде

В соответствии с видом правой части установившееся решение этого линейного уравнения следует искать в виде

где  — постоянные, а
— постоянные, а  — периодическая составляющая.
— периодическая составляющая.
Подставив это в (19.54), получим три уравнения для отыскания указанных величин:

Второе из них дает

Тогда из (19.56) находим

где  определяется формулой (19.51) через внешние воздействия. Наконец, из уравнения (19.58) получаем амплитуду автоколебаний переменной
определяется формулой (19.51) через внешние воздействия. Наконец, из уравнения (19.58) получаем амплитуду автоколебаний переменной 

где  определяется формулой (19.49) через внешнее воздействие, а
определяется формулой (19.49) через внешнее воздействие, а  — формулой (19.48).
— формулой (19.48).
Итак, в данной системе имеются все три составляющие ошибки (19.55), зависящие от величины внешних воздействий и от параметров системы. Наиболее нежелательной из них является составляющая  возрастающая пропорционально времени. Поэтому систему необходимо видоизменить в первую очередь так, чтобы уничтожить эту составляющую ошибки, т. е. сделать
возрастающая пропорционально времени. Поэтому систему необходимо видоизменить в первую очередь так, чтобы уничтожить эту составляющую ошибки, т. е. сделать  Для этого можно было бы вовсе изъять дополнительную обратную связь (рис. 19.5), так как при кос
Для этого можно было бы вовсе изъять дополнительную обратную связь (рис. 19.5), так как при кос  согласно (19.59) будет
согласно (19.59) будет  Однако при этом существенно возрастает амплитуда автоколебаний (19.61), т. е. периодическая составляющая ошибки. Поэтому более целесообразной мерой будет замена жесткой обратной связи
Однако при этом существенно возрастает амплитуда автоколебаний (19.61), т. е. периодическая составляющая ошибки. Поэтому более целесообразной мерой будет замена жесткой обратной связи  на гибкую
на гибкую  . Тогда в уравнении (19.54) величина
. Тогда в уравнении (19.54) величина  заменится на
заменится на  :
:

Как видим, составляющая, пропорциональная времени, в правой части уравнения исчезла, вследствие чего установившееся решение для ошибки х в отличие от (19.55), будет

При этом из (19.62) находимз

причем изменяются, конечно, и формулы для  (их можно получить таким же способом). Подбором параметров системы амплитуду автоколебаний ошибки
(их можно получить таким же способом). Подбором параметров системы амплитуду автоколебаний ошибки  можно сделать весьма малой.
можно сделать весьма малой.
Определение динамических ошибок (по
скорости, по ускорению) для статической и астатических систем.
Точность АС
характеризуется величиной ошибки в установившемся режиме и зависит от характера
воздействия, а также структуры и параметров системы.
Реальные воздействия
в радиотехнических следящих системах описывается сложными (случайными)
функциями времени. Однако при анализе точности управления часто используют
простые детерминированные воздействия: постоянное ступенчатое, линейное,
квадратичное и другие. Это позволяет упростить анализ и в то же время сохранить
в модели задающего воздействия наиболее существенные признаки (начальное
значение, скорость изменения, ускорение). Большинство систем радиоавтоматики
описываются передаточными функциями вида
 , (11.1)
, (11.1)
где Ki — общее усиление
разомкнутой системы, i – число интегрирующих
звеньев, определяющее порядок астатизма системы;
– полиномы, порядок которых определяется числом типовых
звеньев (n и m соответственно инерционных и форсирующих), а
коэффициенты полиномов – постоянными времени типовых звеньев.
11.1. Статические ошибки
Ошибка системы при постоянном
(ступенчатом) воздействии x(t)=x0=const при t³0
называется статическойeст.
Для установившейся
ошибки, учитывая, что изображение X(p)=x0/p,
запишем:
 . (11.2)
. (11.2)
Для статической
системы (не содержащей интегрирующих звеньев) статическая ошибка равна
 . (11.3)
. (11.3)
Таким образом, в
статических системах установившееся значение управляемой переменной не равно
заданному: меньше на величину ошибки, значение которой обратно пропорционально
усилению К0 по постоянному току (обычно К0>>1).
Для астатических
систем (i ³ 1) ошибка при постоянном воздействии
![]() ,
,
так как числитель в (11.2) равен нулю, а знаменатель равен
Кi.
Отсутствие
статической ошибки обусловило название таких систем – астатические.
11.2. Динамические ошибки
Ошибка,
характеризующая точность замкнутой системы при меняющемся воздействии,
называется динамической eд(t).
Любое детерминированное
воздействие (при условии существования его производных d(k)/dt(k),
k=1, 2, …) можно представить в виде ряда
 , (11.4)
, (11.4)
где x0 — начальное значение, ![]() — скорость изменения,
— скорость изменения, ![]() — ускорение и т. д.
— ускорение и т. д.
Для вычисления
динамических ошибок при типовых воздействиях (линейном и квадратическом)
представим выражение для ошибки в операторной форме:
![]() (11.5)
(11.5)
Используя разложение
передаточной функции Ke(p) в ряд Маклорена по степеням
переменной р, перепишем (11.5) в виде
 (11.6)
(11.6)
где C0, C1, C2,
… — коэффициенты ошибок, определяемые
как
 (11.7)
(11.7)
Установившееся
значение ошибки при произвольном воздействии x(t)
на основании (11.6) определяется временным рядом
 (11.8)
(11.8)
Чем меньше
коэффициенты ошибок, тем выше точность системы при произвольном
детерминированном воздействии. При вычислении коэффициентов Ck
обычно ограничиваются только первыми тремя (для систем с астатизмом не выше
второго порядка).
Коэффициент C0
в соответствии с (11.7) равен
 .
.
Для статических
систем (i=0) C0=1/(1+K0), а для
астатических систем C0=0.
Определим динамические
ошибки типовых систем при линейном воздействии (изменение с постоянной
скоростью) x(t)=nxt.
В соответствии с
формулой (11.8) динамическая ошибка (ошибка по скорости) определяется как
![]() .
.
Для статической
системы она равна
так как вклад составляющей C1nx
значительно меньше, чем C0 x(t), которая растет
линейно со временем. Таким образом, скоростная ошибка в статических системах
накапливается со временем со скоростью nx/(1+K0), что делает неприемлемым использование
таких систем при меняющемся воздействии. Для астатических систем C0=0 и скоростная ошибка
![]() .
.
Нахождение
коэффициента ошибки C1 с использованием формулы (11.7)
затруднительно. Более простой способ его вычисления основан на сравнении
точного выражения для передаточной функции Ke(p) и
аппроксимирующего ее ряда:
 (11.9)
(11.9)
Уравнение (11.9)
можно представить в виде
 (11.10)
(11.10)
Полагая i= 1 (астатическая система первого порядка) и приравнивая
коэффициенты при переменной p в левой и правой частях уравнения, находим
![]()
или C1=1/K1, так как C0=0.
Таким образом,
скоростная ошибка системы первого порядка астатизма eд=nx/K1
определяется усилением разомкнутой системы K1 и не зависит от
времени. Параметр K1, имеющий размерность c –1,
называется добротностью системы по скорости (чем выше добротность, тем
точнее система).
Для астатической
системы второго порядка скоростная ошибка равна нулю, так как оба коэффициента C0=C1=0.
Равенство C1=0 вытекает из уравнения (11.10), так как в
правой части уравнения не содержится слагаемого, в которое входит переменная p
(есть только с p2 и выше).
Оценим динамические
ошибки типовых систем при квадратичном воздействии (изменение с постоянным
ускорением)![]() .
.
В соответствии с (11.8)
для динамической ошибки (ошибки по ускорению) запишем
 . (11.11)
. (11.11)
Для статической
системы ошибка по ускорению равна
 (11.12)
(11.12)
так как составляющие ошибки с коэффициентами C1 и C2
вносят пренебрежимо малый вклад в результирующую ошибку. Накопление ошибки по
квадратичному закону исключает применение статических систем при наличии
ускорения.
Для системы первого
порядка астатизма ошибка по ускорению равна
 (11.13)
(11.13)
(вкладом составляющей ![]() можно
можно
пренебречь). Накопление ошибки со временем (со скоростью ![]() ) не позволяет применять такие
) не позволяет применять такие
системы при наличии ускорения. Для астатической системы второго порядка ошибка
по ускорению равна
 . (11.14)
. (11.14)
Определение
коэффициента ошибки C2 с использованием уравнения (11.7)
сводится к приравниванию коэффициентов при p2 в обеих частях
уравнения:
 . (11.15)
. (11.15)
Откуда
C2/2=1/K2, так как C0=C1=0.
Помимо статистических ошибок точность работы систем радиоавтоматики характеризуется динамическими и переходными ошибками.
Динамическая ошибка – ошибка в установившемся режиме работы системы при действии на неё нестационарного сигнала.
Переходная ошибка – ошибка при работе системы в переходном процессе, который возникает при отработке начального рассогласования.
Динамическая точность работы систем радиоавтоматики определяется при медленно изменяющихся входных сигналах (воздействия, число производных от которых ограничено).
Cигнал  относится к медленно изменяющемуся воздействию, так как число производных от этого сигнала неравных нулю, равно
относится к медленно изменяющемуся воздействию, так как число производных от этого сигнала неравных нулю, равно , а
, а  -я производная равна нулю. Гармонический сигнал не является медленно изменяющимся, так как число производных от него равно
-я производная равна нулю. Гармонический сигнал не является медленно изменяющимся, так как число производных от него равно  .
.
Переходные процессы в системах радиоавтоматики затухают значительно быстрее по сравнению с изменением медленно изменяющегося сигнала, поэтому и достигается установившейся динамический режим работы системы.
По определению передаточной функции рассогласования преобразование Лапласа для ошибки системы:
 (6.1)
(6.1)
или в области действительного переменного
 (6.2)
(6.2)
Число слагаемых в последнем выражении ограничено, так как сигнал  является медленно изменяющимся воздействием. Для нахождения неизвестных коэффициентов
является медленно изменяющимся воздействием. Для нахождения неизвестных коэффициентов  , которые называются коэффициентами ошибки, известны три способа.
, которые называются коэффициентами ошибки, известны три способа.
1) 
2) Вторым способом коэффициенты ошибок находятся путём деления числителя передаточной функции ошибки на её знаменатель.
3) Для реализации третьего способа представим передаточную функцию ошибки в виде:
 .
.
Перемножив полином знаменателя на (6.1), получим:
 (6.3)
(6.3)
Приравняв коэффициенты при одинаковых степенях  слева и справа в выражении (6.3), определим формулы для последовательного вычисления коэффициентов ошибок:
слева и справа в выражении (6.3), определим формулы для последовательного вычисления коэффициентов ошибок:

2 Влияние на ошибку системы коэффициента усиления системы и введение форсирующего звена
В инженерных расчётах коэффициенты ошибок удобнее рассчитывать через коэффициенты передаточной функции разомкнутой системы:
 , (6.4)
, (6.4)
где  — порядок астатизма системы.
— порядок астатизма системы.
Первое слагаемое в выражении (6.2) называют ошибкой по положению, а коэффициент  -коэффициентом ошибки по положению, второе слагаемое – ошибкой по скорости, а коэффициент
-коэффициентом ошибки по положению, второе слагаемое – ошибкой по скорости, а коэффициент  — коэффициентом ошибки по скорости. Аналогично, третье слагаемое в (6.2) называют ошибкой по ускорению, а коэффициент
— коэффициентом ошибки по скорости. Аналогично, третье слагаемое в (6.2) называют ошибкой по ускорению, а коэффициент  — коэффициентом ошибки по ускорению.
— коэффициентом ошибки по ускорению.
В астатических системах первых коэффициентов ошибок равны нулю, где — порядок астатизма системы радиоавтоматики.
При анализе качества работы систем радиоавтоматики помимо вычисления ошибок при медленно изменяющихся сигналах приходится оценивать точность и при гармонических воздействиях. В этом случае нельзя применять метод коэффициентов ошибок, так как число производных от гармонического сигнала не ограничено. При этом для расчёта ошибок необходимо использовать частотные характеристики. По амплитудно-частотной характеристике ошибки вычисляется амплитуда колебаний ошибки, по фазочастотной характеристике – сдвиг колебаний ошибки относительно входного сигнала.
Пример 6.1. Найти динамическую ошибку при входном сигнале  следящей системы, передаточная функция которой в разомкнутом состоянии
следящей системы, передаточная функция которой в разомкнутом состоянии
 .
.
Преобразуем  .
.
Коэффициент астатизма  .Тогда
.Тогда  ,
,
 ,
,
 .
.
Подставим данные в выражение (2), получим:

Вывод. При увеличении коэффициента усиления системы и введении форсирующего звена ошибка уменьшается, увеличение же постоянных времени инерционных звеньев ухудшает динамическую ошибку системы.
3 Средняя квадратическая ошибка системы.
В большинстве случаев закон распределения ошибки системы можно считать гауссовским, поэтому для расчёта составляющих суммарной средней квадратической ошибки достаточно учесть математическое ожидание и корреляционную функцию ошибки или её спектральную плотность.
На вход системы подаётся воздействие вида:
 ,
,
где
— случайный сигнал;  — случайная помеха.
— случайная помеха.

 — cуммарная ошибка системы, где
— cуммарная ошибка системы, где  — выходной сигнал системы.
— выходной сигнал системы.
Рис. 7.1. К определению суммарной ошибки
На приведённом рисунке круг означает сумматор, а сектор круга со знаком минус означает операцию вычитания.
Преобразование Лапласа для суммарной ошибки:
 (7.1)
(7.1)
Вывод. Суммарная ошибка состоит из двух составляющих, одна из которых, определяющая точность воспроизведения сигнала, зависит от передаточной функции ошибки, вторая, обусловленная действием помехи, — от передаточной функции замкнутой системы.
Предположим, что сигнал и помеха являются стационарными случайными функциями. Тогда математическое ожидание помехи  , а случайный сигнал представим в виде:
, а случайный сигнал представим в виде:
 ,
,
где
 — математическое ожидание сигнала;
— математическое ожидание сигнала;  — случайная составляющая сигнала.
— случайная составляющая сигнала.
Математическое ожидание суммарной ошибки рассчитывают по теореме о конечном значении функции:
 .
.