
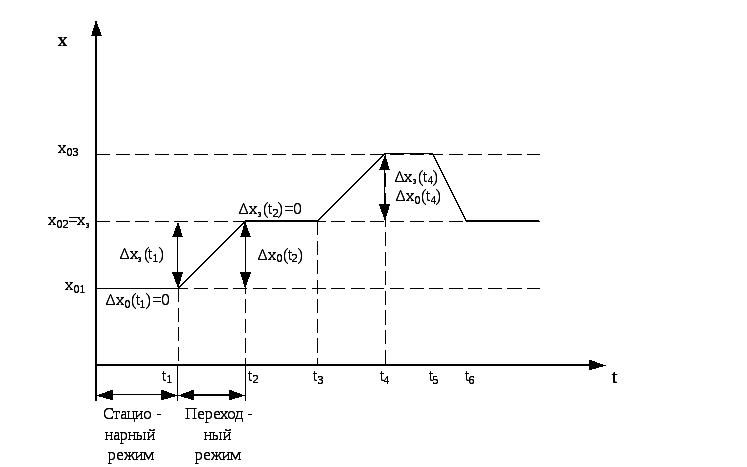
Действительные
значения регулируемой величины в
реальных САР отличаются от предписанных.
Разность между предписанным и
действительным значениями регулируемой
величины называется ошибкой
регулирования.
∆xз(t)
= xз
– x(t)
– ошибка регулирования
хз
– предписанное (заданное) значение
управляемой величины;
x(t)
– ее текущее значение
В
процессе функционирования САР может
переходить от одного состояния,
принимаемого за исходное, в другое.
Разность между текущими значениями
регулируемой величины и значением,
соответствующим исходному состоянию,
принято называть отклонением регулируемой
величины
∆x0(t)
= x(t)
– x0(t) (1.3)
где
xo
– значение регулируемой величины в
исходном состоянии.
x0(t)
– исходное значение регулируемой
величины.
|
|
|
Рис. |
1.4. Статическое и астатическое регулирование
В
зависимости от того, является или нет
ошибка регулирования функцией возмущающего
воздействия в установившемся режиме,
различают статическое
и астатическое
регулирование.
При
статическом регулировании ошибка
регулирования возрастает с увеличением
значения возмущающего воздействия.
Пример статического регулирования
приведен на рис. 1.4, а).
|
|
|
а) |
|
|
|
б) |
|
|
|
в) |
|
Рис. |
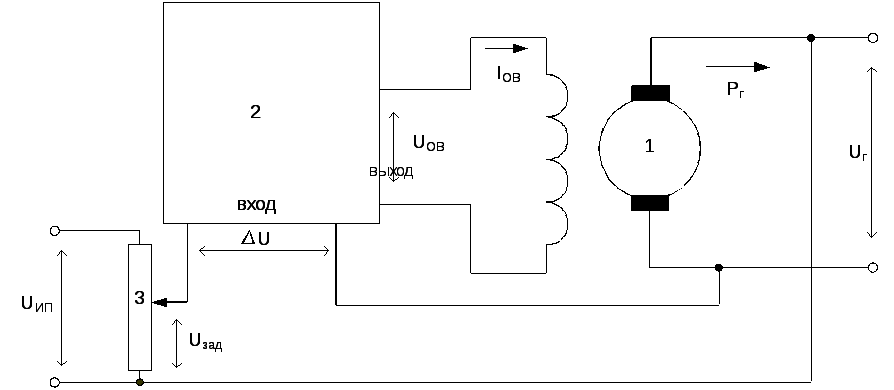
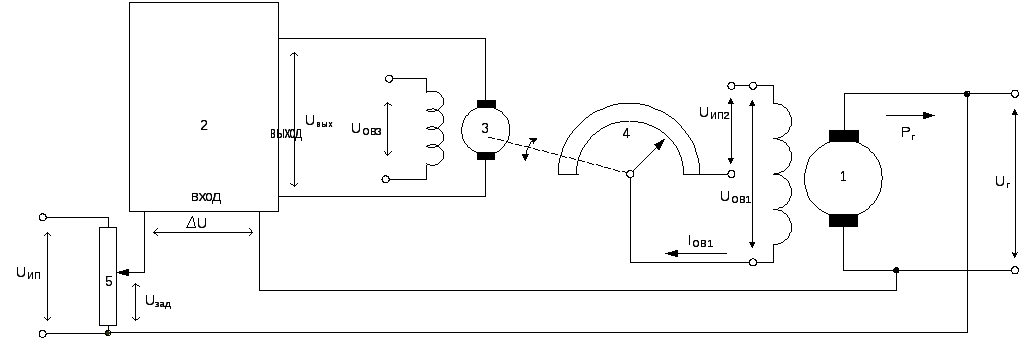
Принцип
действия этого регулятора достаточно
ясно виден из рассмотрения схемы и
особых пояснений не требует. Заметим
лишь, что требуемого возбуждение
генератора 1 осуществляется путем
изменения входного сигнала (ΔU)
электронного усилителя 2. В свою очередь
этот сигнал пропорционален отклонению
регулируемого параметра Uг
от заданного значения Uзад
(ΔU=Uг–Uзад).
Поэтому такое отклонение, т.е. наличие
ΔU,
является неизбежным и должно быть тем
больше, чем больше изменяется величина
внешнего возмущения Pг.
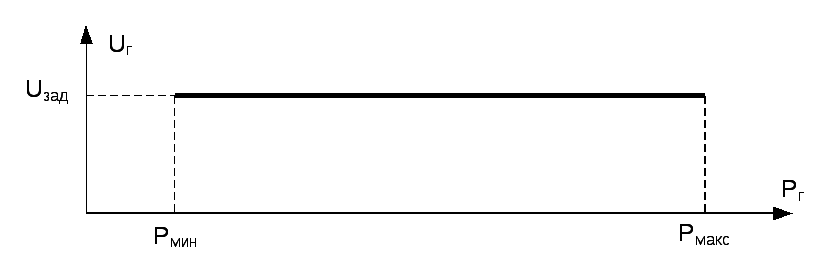
Очевидно, что это отклонение регулируемого
параметра от заданного значения
сохраняется также и в установившемся
режиме.
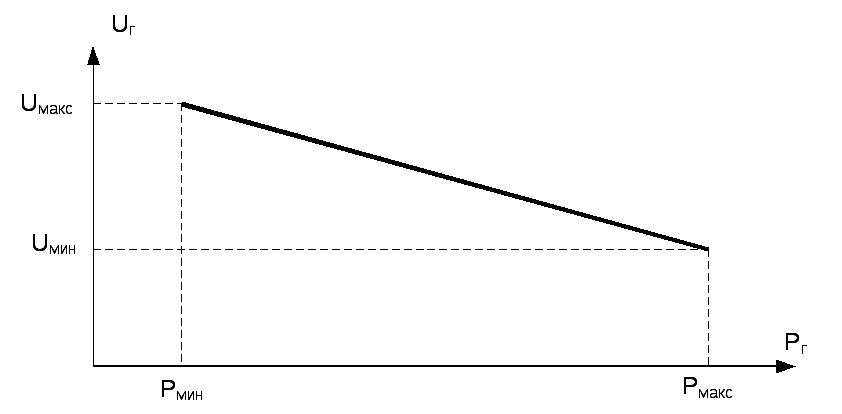
Рабочая
характеристика (зависимость напряжения
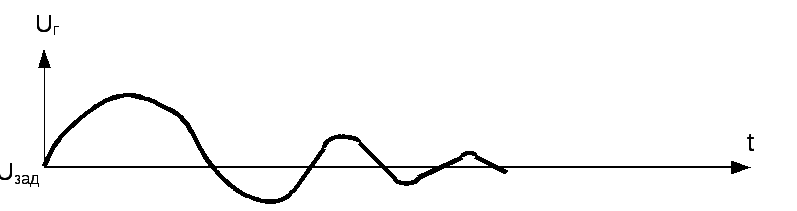
генератора от нагрузки – активной
мощности Pг)
статического регулятора приведена на
рис. 1.4, б).
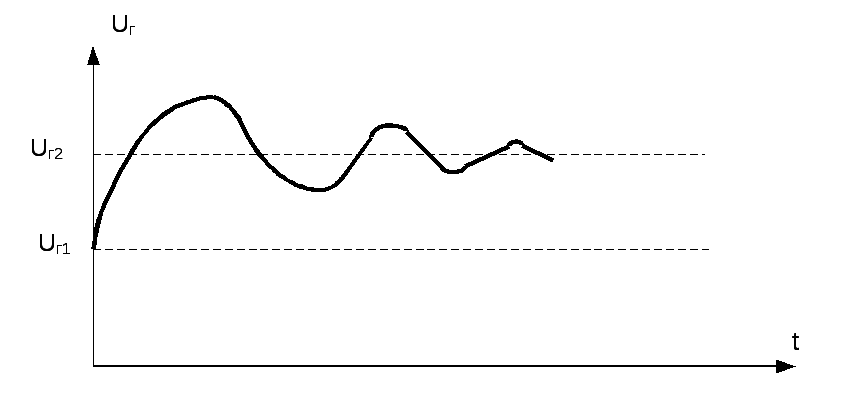
На
рис. 1.4, в)
показан переходный процесс в системе
при уменьшении нагрузки генератора.
Регулированием
с астатической
характеристикой
называется такое регулирование, при
котором в установившемся состоянии
системы отклонение регулируемого
параметра от заданного значения равно
нулю при любой величине внешнего
возмущения. Равновесие системы имеет
место всегда при заданном значении
регулируемого параметра.
Пример
астатического регулирования приведен
на рис. 1.5, а).
|
|
|
а) |
|
|
|
б) |
|
|
|
в) |
|
Рис. |
Характеристика
астатического регулятора приведена на
рис. 1.5, б),
а кривая переходного процесса – на рис.
1.5, в).
При
увеличении нагрузки на генераторе, т.е.
увеличении активной мощности генератора
Pг,
уменьшается напряжение на его выводах
Uг,
что приводит к появлению отклонения
регулируемого параметра Uг
от заданного значения Uзад
(ΔU=Uг–Uзад).
Параметр Uзад
задается
регулировочным реостатом 5. При этом
появляется напряжение на якоре двигателя
постоянного тока Uвых,
и двигатель начинает перемещать контакт
регулировочного реостата 4 по часовой
стрелке, что приводит к увеличению тока
возбуждения генератора IОВ1,
а значит, и напряжения на его выводах
Uг.
Параметр Uг
будет увеличиваться до тех пор, пока
ошибка регулирования ΔU
не станет равной 0.
Астатические
САР обеспечивают высокую точность
регулирования. Однако по сравнению со
статическими они являются более сложными
и инерционными, т.е. процессы регулирования
в них являются замедленными.
1.5.
Линейные и нелинейные системы. Линеаризация
уравнений
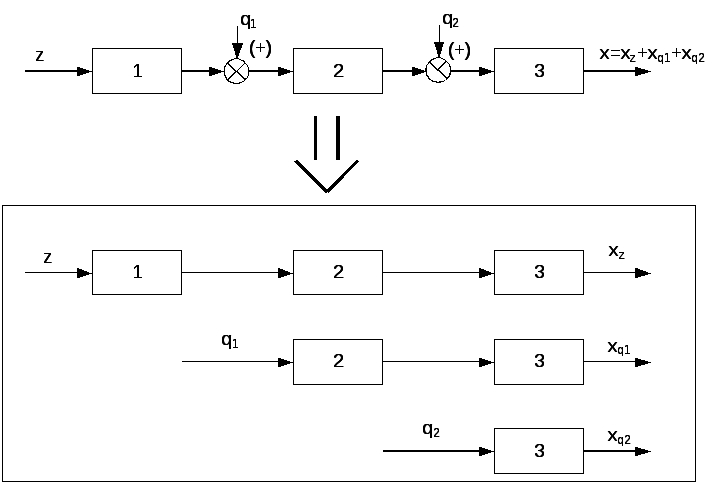
Системы,
процессы в которых могут быть описаны
линейными дифференциальными уравнениями
с постоянными коэффициентами, называются
линейными.
Для линейных систем применим принцип
суперпозиции, позволяющий рассматривать
независимое прохождение воздействий,
что дает существенное упрощение (рис.
1.6).
|
|
|
Рис. |
Нелинейной
называется система, для описания
процессов в которой приходится применять
одно или несколько нелинейных уравнений.
К нелинейным относятся уравнения,
коэффициенты которых зависят от значений
переменных величин или их производных,
а также уравнения, содержащие произведения
или степени (выше первой) этих величин.
Строго
говоря, линейных САУ в технике практически
нет или очень мало. Однако большинство
систем при определенных условиях могут
рассматриваться как линейные. Так, если
оценивать поведение системы при малых
отклонениях величин от исходных значений,
то в большинстве случаев имеющей место
нелинейностью можно пренебречь. Такая
возможность имеет математическое
обоснование.
Пусть
имеем некоторую непрерывную функцию
F(x)
(рис. 1.7).
Если
аргумент X
получил приращение ΔX
от исходного значения Xo,
то функция получит приращение ΔF(X).
Новое значение функции F(X)
можно разложить в ряд Тейлора:

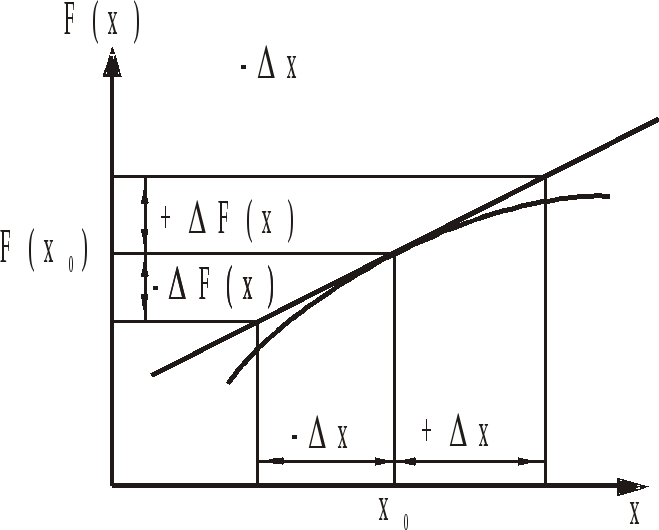
Рис.
1.7. Пример линеаризации нелинейной
функции
При
малых значениях Δx
можно ограничиться только первыми двумя
членами разложения, т.к. остальные имеют
более высокий порядок малости, т.е. можно
считать
![]() ,
,
где
![]() .
.
Теоретически
это означает, что на интервале ±Δx
(рис. 1.6) кривая F(x)
заменяется прямой линией, являющейся
касательной при x=xo.
Таким
образом, если составлять уравнение
системы не для полных значений величин,
а только для отклонений, то эти уравнения
будут линейными. Такая операция называется
линеаризацией
уравнений.
Следует, однако, отметить, что это
справедливо только для тех случаев,
когда нелинейные функции являются
непрерывными и имеют непрерывные
производные при x=xo.
Пример
линеаризации нелинейного элемента
системы.
В
качестве типового элемента, уравнение
которого подлежит линеаризации, возьмем
RL-элемент,
часто встречающийся в электрических
системах регулирования и изображенный
на рис. 1.8, а). Пусть входной и выходной
величинами такого элемента являются
напряжения.
|
|
|
|
а) |
б) |
|
Рис. |
Предположим
сначала, что активные сопротивления и
индуктивность не зависят от протекающего
через них тока, т.е. будем считать, что
элемент является линейным.
Тогда
дифференциальное уравнение элемента
в случае, если потокосцепление
катушки
элементазависит от тока линейно, т.е.
если индуктивность L=/i
не зависит от тока и является величиной
постоянной, имеет вид:
![]()
Обозначив
![]()
и
![]() ,
,
учитывая, что
![]() ,
,
и пользуясь операторной (символической)
формой записи, в которой принято
![]() ,
,
получим:
|
|
(1.3) |
Предположим
теперь, что в рассматриваемом примере
индуктивность зависит от тока и,
следовательно, элемент является
нелинейным. Тогда уравнение (1.3) для
такого элемента неправомерно, ибо
потокосцепление
зависит от тока нелинейно и, следовательно,
L=/i
есть величина переменная. Для
усатновившегося режима элемента при
входном постоянном напряжении uвх
потокосцепление 0
тоже постоянно во времени и, следовательно,
![]() .
.
Тогда можно написать:
![]() .
.
Изменение
входного напряжения повлечет за собой
изменение тока и выходного напряжения.
Текущие
значения uвх
и uвых
и i
можно представить так:
![]() ;
;
![]() ;
;
![]() ,
,
где
Δuвх,
Δuвых
и Δi
– отклонения
соответствующих величин от их
установившихся значений.
Пусть
потокосцепление является нелинейной
функцией тока, как это показано на рис.
1.8, б).
Эту функцию можно разложить в ряд:
|
|
(1.4) |

При
достаточно малых отклонения тока можно
ограничиться первыми двумя членами
ряда. Величина
![]()
определяется тангенсом угла наклона
касательной к кривой, приведенной на
рис. 1.8,б), в
точке с абсциссой i0.
Обозначив
динамическую индуктивность элемента
для тока i0
через Lд,
т. е.
![]() ,
,
можем написать:
![]() .
.
Так
как
![]() ,
,
то будем иметь:
![]() .
.
Исходное
уравнение запишется теперь так:
![]() ,
,
или,
подставляя ранее найденное выражение
для uвых0,
получим:
![]() .
.
Последнее
выражение является линейным дифференциальным
уравнением с постоянными коэффициентами,
которое можно записать в операторной
форме так:
|
|
(1.5) |
где
![]()
и k=1.
Оно
справедливо только для малых отклонений
входной и выходной величины относительно
начального значения uвх0.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Часть 1. От практики к теории.
Часть 2. Реализация регулятора – от простого к настоящему.
Часть 3. Реализация регулятора – вот теперь регулятор.
Часть 4. Мир развивается, а «велосипед» остается.
Реализация регулятора в ПЛК
Лирика
Все, что будет написано ниже про реализацию ПИД-регулятора в ПЛК, не является чем-то новым и революционным. Практически всю эту информацию можно найти в документации на ПЛК серьезных производителей. Если вы инженер АСУТП со стажем и добросовестно изучали документацию на ПЛК, то все это вам известно. Но в текущей реалии есть каста молодых инженеров и студентов, которая все знания черпает из роликов на ютубе. Заставив себя посмотреть несколько самых популярных роликов про реализацию ПИД-регулятора, я был огорчен качеством излагаемого материала: объяснение работы ПИД-регулятора уж очень «колхозное», а реализация сводится к 15 строкам кода на С++, что порождает
упрощенное и ошибочное понимание предмета. Вот для касты ютуб специалистов в
первую очередь и предназначено это описание.
Теперь необходимо определиться с терминологией

Для более наглядного изложения перейдем от теоретического описания к «инженерному», которое используется в повседневной практике, пусть это и не совсем корректно, т.е. регулируем уровень в колонне посредством изменения положения регулирующего клапана:
-
ПИД – функция (функциональный или программный блок) реализующая алгоритм регулирования, включает три составляющих: П – пропорциональная составляющая, И – интегральная составляющая, Д – дифференциальная составляющая;
-
переменная процесса PV – значение текущего уровня, полученное с уровнемера, может измеряться как в инженерных единицах (мм), так и в относительных (%);
-
уставка SP (задание регулятору) – значение уровня, которое должен поддерживать регулятор в автоматическом режиме, единицы измерения как у PV;
-
выход регулятора OP – значение, которое формирует регулятор и которое определяет положение клапана, в нашем примере будет 0-100%;
-
E – ошибка или рассогласование, разница между уставкой и фактическим значением переменной процесса, ошибка подается на вход ПИД-функции;
-
tс – время цикла, периодичность с которой в ПЛК выполняется ПИД-функция (можно конечно поместить ПИД-функцию в циклическую задачу, и она будет выполняться каждый цикл ПЛК, но тогда время цикла предсказать невозможно и для расчета интегральной и дифференциальной составляющей определять время придется внутри ПИД-функции, проще всю ПИД-функцию выполнять периодически с фиксированным временем цикла);
-
прямое/обратное направление действия регулятора – режим формирования регулятором выходного значения, прямое действие — при увеличении значения переменной процесса PV регулятор увеличивает значение выхода OP, обратном действие — при увеличении значения переменной процесса PV регулятор уменьшает значение выхода OP.

Реализуется направление действия регулятора методом вычисления ошибки, для прямого действия E=PV-SP, для обратного E=SP-PV. На рисунке показаны два варианта установки клапана для регулирования уровня в емкости. Первый вариант – клапан LV1 установлен на отводящем трубопроводе, т.е при увеличении уровня (PV) клапан должен открываться, это прямое действие регулятора E=PV-SP. Второй вариант – клапан LV2 установлен на подающем трубопроводе, т.е. при повышении уровня клапан должен закрываться, это будет обратное действие регулятора E=SP-PV.
ПЛК является дискретным устройством, поэтому ПИД-функция выполняется периодически с заданным временем цикла tc и формула ПИД-регулятора трансформируется из непрерывной формы в дискретную:

OP – выход ПИД-функции, E – ошибка (рассогласование), n – текущий цикл, n-1 – предыдущий цикл, tc – время цикла ПИД-функции, kP,kI,kD – коэффициенты П,И,Д-составляющих. Для дискретной формы вместо времени используется номер отсчета (цикла). В таком виде ПИД-функция и реализуется в ПЛК.
Рассмотрим работу регулятора только с П-составляющей (пропорциональное регулирование) для исходного примера — поддержание уровня в емкости клапаном на отводящем трубопроводе. Регулятор получается прямого действия E=PV-SP. Время цикла для выполнения ПИД-функции примем 0,3 секунды, коэффициент kP=2, диапазон уровнемера 0-100%, диапазон открытия регулирующего клапана 0-100%, расход на отводящем трубопроводе линейно зависит от положения клапана, 10% открытия клапана соответствует расходу 10м3/час.
В начальный момент жидкость в емкости отсутствует (уровень равен нулю), расхода в подающем трубопроводе нет. В регуляторе задана уставка 30%. При таких условиях ошибка (рассогласование) на входе в П-функцию E=PV-SP=0-30=-30 (отрицательная). Выход П-функции OP=kP*E также получается отрицательным, но положение клапана не может быть меньше «0», поэтому клапан просто полностью закрыт.
Подаем жидкость в емкость с фиксированным расходом (условно 10м3/ч), емкость наполняется, значение уровня увеличивается, достигает значения уставки 30% и продолжает постепенно увеличивается. Ошибка E=PV-SP становится положительной и также увеличивается, соответственно значение выхода П-функции OP=kP*E становится положительным клапан начинает открываться. Чем выше уровень в емкости, тем больше значение ошибки на входе П-функции и больше открытие клапана. При значении уровня в 35% значение ошибки будет E=PV-SP=35-30=5, открытие клапана будет OP=kP*E=5*2=10%, что обеспечивает расход в отходящем трубопроводе 10м3/час. Расход в отводящем трубопроводе равен расходу в подающем трубопроводе, следовательно изменение уровня в емкости прекратилось, система пришла в равновесие, т.е. при kP=2 равновесие (стабилизация, окончание процесса регулирования) наступает при ошибке E=5%.

В П-регуляторе значение ошибки не может быть равным «0». Чтобы обеспечивать требуемый расход в отходящем трубопроводе, на входе П-регулятора должна быть ошибка, соответствующая необходимому положению клапана, а при E=0 выход OP также будет равен «0», клапан будет закрыт.
Чтобы уменьшить ошибку П-регулятора, нужно увеличивать коэффициент kP. При kP=5 ошибка будет E=2, так как OP=kP*E=5*2=10, что соответствует требуемому положению клапана.

В идеальной системе, в которой отсутствует запаздывание, коэффициент kP можно увеличивать до бесконечности, тем самым уменьшая ошибку в установившимся режиме. В реальных системах запаздывание присутствует всегда. В нашем примере, изменение уровня в емкости будет отставать от изменения положения клапана, а показания уровнемера будут отставать от фактического значения уровня. На следующем рисунке показано поведение системы при наличии запаздывания между показаниями уровнемера и фактическим уровнем на 10 циклов. При том же kP=2 в системе появилось перерегулирование, «перебег» клапана и затухающие колебания.

Теперь, при наличии запаздывания в системе, если увеличить коэффициент усиления kP=3, колебания в системе становятся незатухающими, система теряет устойчивость.

Это означает, что в реальной системе коэффициент kP имеет предельное максимальное значение, выше которого система теряет устойчивость. Максимальному kP соответствует минимальная ошибка, которую можно обеспечить без потери устойчивости. Дальнейшее уменьшение ошибки одной П-функцией невозможно.
Эксперименты с П-функцией на этом можно закончить, возвращаемся к реализации регулятора в ПЛК.
По наличию статической ошибки — регуляторы статические и астатические. [c.35]
Интегральное регулирование допускает, большие изменения нагрузки и исключает возможность появления статической ошибки. Поэтому такая комбинация дает хорошие результаты почти во всех случаях, за исключением процессов с очень резкими возмущающими воздействиями или очень большими запаздываниями. Регуляторы такого типа иногда называют регуляторами с автоматической обратной перестановкой, так как они автоматически сводят к нулю статическую ошибку, возникающую при пропорциональном регулировании. [c.460]
Введение интеграла (использование ПИ-регулятора) устраняет статическую ошибку, но мало улучшает динамику процесса. Добавление импульса по производной (применение ПИД-регуля-тора) существенно повышает быстродействие системы, но при большом коэффициенте усиления возникает значительное перерегулирование и САР становится более чувствительной к внешним возмущениям. Для устранения этих недостатков возможны два пути усложнение САР (создание многоконтурной системы с дополнительными перекрещивающимися обратными связями) или создание регулятора со специальной характеристикой. При этом передаточная функция регулятора должна иметь вид [21] [c.711]
Величины Xyi, Phi, Ху, и р, — координаты узловых точек реальной статической характеристики регулятора (см. рис. 4.8, б). В качестве примера на рис. 4.10 изображена характеристика статической точности регулирования насоса при Dj, = 6,33, рв = 0,05, Ху1 = 0,555, Рн1 = 0,315, Ху2 = 0,86 и рна = 0.56. В шести точках характеристики относительная ошибка регулирования равна нулю, максимальное вначение ее не превышает 6,2%. [c.297]
Полезно заметить, что при астатическом объекте (vj ф 0), но статическом регуляторе (vj = 0), как показывает формула (5.85), постоянное возмущающее воздействие создает в системе статическую ошибку, которая не возникает, если объект статический (vx = 0), а регулятор астатический (vj Ф 0). [c.158]
Изодромные, или пропорционально-инте-тральные, регуляторы (сокращенно ПИ-регуляторы) объединяют в себе положительные свойства пропорциональных и интегральных регуляторов. Как следует из сказанного выше, наличие отрицательной обратной связи благотворно влияет на переходный процесс регулирования, но приводит к остаточному отклонению. В пропорционально-интегральных регуляторах применяется особая обратная связь — упругая, действие которой постепенно исчезает после осуществления пропорционального воздействия. Благодаря этому возникают дополнительные перемещения регулирующего органа, ликвидирующие статическую ошибку. Устройство упругой обратной связи носит название изодрома, откуда и происходит наименование самого регулятора. [c.42]
Величина отклонения параметра в конце процесса регулирования от заданного значения называется остаточной неравномерностью, или статической ошибкой. Она представляет собой отклонение регулируемого параметра в процентах от заданного значения, вызывающее полный ход исполнительного механизма. Например, если степень неравномерности регулятора равна 10%, то это значит, что изменение параметра на I % от шкалы регулятора вызовет перемещение регулирующего органа на Vio его полного хода из одного крайнего положения в другое. Неравномерность, или статическая ошибка, регулирующего органа с чувствительным элементом определяется жесткостью связи. Чем жестче связь, тем большее изменение задания регулируемого параметра вызывает перемещение регулирующего органа на единицу его полного хода. В данном примере жесткость связи определяется положением точки 4 на рычаге 1. Чем больше расстояние между точками 2 я 4, тем жестче связь и больше статическая ошибка. [c.262]
У астатических регуляторов (рис. 18, д) малейшее отклонение входного параметра X вызывает непрерывное движение РО с определенной скоростью до предельного значения К акс- Регулирующий орган остановится только при X = Хо. Если при этом окажется МрФ Мн,, то снова возникнет рассогласование X — Хо и РО дополнительно переместится, пока не остановится в положении, при котором Мр == Мн. и X = Хо, т. е. когда статическая ошибка равна нулю. Именно поэтому их и называют астатическими. [c.36]
Диапазон пропорциональности и соответственно коэффициент усиления (чувствительность прибора) зависит от жесткости пружины, площади мембраны и обычно не регулируется. В схеме на рис. 19, а коэффициент усиления зависит также от соотношения плеч рычага ОА и ОБ. Перемещая винтом 2 центр О вправо, можно повысить чувствительность прибора. Характеристика 1 — 2 станет круче. Это уменьшит ДП, а следовательно, и статическую ошибку. Однако в реальных регуляторах увеличение чувствительности ухудшает переходные характеристики. [c.39]
Устраняя статическую ошибку, И-регуляторы, однако, ухудшают качество переходного процесса в системе. При малой скорости перемещения РО изменение нагрузки вызывает слишком большие отклонения регулируемого параметра, а при большой скорости РО возникают долго незатухающие колебания. Эти особенности И-регуляторов станут понятнее, когда будет рассмотрена совместная работа регуляторов с объектом (см. рис. 25). [c.41]
С увеличением тепловой нагрузки установившийся режим может наступить только при условии большей подачи жидкости через ТРВ. Из статической характеристики видно, что это возможно лишь при большем перегреве, т. е. испаритель будет заполнен меньше (точка Б на рис. 75, а). С увеличением давления на входе в ТРВ (р ) пропускная способность его увеличивается и требуемая производительность его будет обеспечена при меньшем перегреве (точка Б» на рис. 75,а). Таким образом, ТРВ, как всякий пропорциональный регулятор, неизбежно дает статическую ошибку, однако ошибка эта невелика и практически не ухудшает работу испарителя (см. гл. IV). [c.155]
Более экономичен способ регулирования р водорегулирующим вентилем. При снижении р давление на мембрану регулятора падает и под действием пружины ВРВ уменьшает подачу воды. В пределах статической ошибки ( 1,5 кгс/см ) ВРВ поддерживает р постоянным. [c.220]
Пропорциональные регуляторы неизбежно дают статическую ошибку, поэтому их относят к классу статических регуляторов. Действительно, при больших нагрузках должно возрасти и регулирующее воздействие, т. е. открытие клапана К должно быть больше среднего значения Уц- А, значение Х ст при этом как видно из статической характеристики, должно быть больше, чем Хо, т. е. устанавливается статическая ошибка, равная Ху т — Хц. [c.130]
У статических регуляторов (рис. 18, а) установившееся значение выходного параметра У однозначно ( жестко ) определяется значением входного параметра X. При регулировании они неизбежно дают статическую ошибку (см. рис. 7,б и в). [c.39]
Статическая ошибка регулятора прямого действия существенно зависит от силы, возникающей со стороны регулирующего органа насоса, в частности, наклонной шайбы. Сила трения на регулирующем органе насоса приводит к петлевой статической характеристике регулятора прямого действия. Снизить влияние нагрузки на регулятор можно, увеличив эффективную плоы адь плунжера и соответственно жесткость пружинного блока. Однако из-за этого во многих случаях габаритные размеры регулятора мощности прямого действия значительно увеличиваются. [c.284]
Сиглске [21], анализируя полученные динамические характеристики колпачковой абсорбционной колонны, предположил, что необходимо поддерживать постоянным состав выходящего газа. В результате показано, что по динамике лучше всего воздействовать на состав входящей жидкости (канал состав входящей жидкости—состав выходящего газа является наименее инерционным). Однако из практических соображений удобнее воздействовать на подачу входящей жидкости некоторое ухудшение динамических свойств при этом компенсируется техническими преимуществами. При использовании в этом случае П-регулятора САР устойчива, но передемпфирована она имеет статическую ошибку, и процесс регулирования проходит медленно. [c.711]
На рис. 4.5 показан аксиально-поршневой насос / с валом 2 и регулятором мощности прямого действия. Через отверстия А Б камеру с плунжером 5 поступа<т рабочая жидкость под давлением Рн- Плунжер 5 через промежуточный толкатель 4 поворачивает наклонную шайбу 6, пока сила со стороны пружинного блока 3 не уравновесит силу давления жидкости. Перемещение Ху и поворот шайбы приводят к изменению удельного рабочего объема i7n насоса. Пружинный блок составлен из двух цилиндрических пружин различной длины, поэтому статическая характеристика данного регулятора имеет вид ломаной линии (см. на рис. 4.4, б линию 2). Отклоиеиие ломаной линии 2 от идеальной статической характеристики (линии 1) приводит к появлению статической ошибки регулирования. (Изготовление специальной пружины с заданной нелинейной характеристикой сопряжено со значительными трудностями). [c.283]
Рассматриваемый регулятор имеет дополнительный подвод энергии в виде рабочей жидкости, поступающей от вспомогательного насоса в исполнительный механизм через отверстие Б и уходящей на слив через В. Благодаря вспомогательному следящему приводу, называемому иногда гидроусилителем, нагрузка со стороны регулирующего органа насоса несущественно влияет на статическую характеристику регулятора мощности. Использование в пружинном блоке трех пружин различной жесткости уменьшает статическую ошибку по сравнению с двухпружинным блоком. Демпфирующий поршень снижает колебания регулятора при переходном процессе. [c.285]
Соотношение (5.88) показывает, что при отсутствии в системе интегрирующих звеньев (разомкнутая система — статическая) постоянные воздействия и /о вызывают постоянную установив-щуюся ошибку (,, которую называют статической. Эта ошибка будет тем меньше, чем больше коэффициент-усиления К. системы, причем для уменьшения статической ошибки, вызываемой возмущающим воздействием, следует для увеличения К увеличивать коэффициент /Са регулятора, а не К объекта. [c.158]
Критерий статической ошибки. При использовании статических, регуляторов каждому значению величины статичеокого отклонения возмущающего воздействия соответствует определенное отклонение выходного пара-M Tipa объекта. [c.109]
Отклонение выходного параметра от требуемого значения есть величина статической ошибкй, которая тем меньше, чем меньше коэффициент усиления по дйн-ному каналу, т. е. чем выше коэфф ицие Нт усиления uetiH регулированиями ниже так называемая степень нерав- номерности самого регулятора. [c.109]
Пропорциональные регуляторы не могут поддерживать постоянное значение регулируемой величины, так как перемещение регулирующего органа в таких системах однозначно связано с изменением входной величины, следовательно, всякому новому его положению, необходимому при изменениях нагрузки, отвечает некоторое новое значение регулируемого параметра. Это неизбежное отклонение называют остаточной неравномерностью регулирования или статической ошибкой. Величина остаточной неравномерности тем менЫне, чем больше коэффициент передачи регулятора по прямому тракту. [c.41]
У астатических регуляторов регулирующий орган перемещается со-скоростью, пропорциональной отклонению регулируемого параметра. Преимуществом регуляторов этого типа является то, что установившееся значение регулируемой величины не зависит от нагруз-ки, и статическая ошибка равна нулю. Однако астатические регуляторы можно применять лишь для управления объектами, обладающими самовыравни-ванием в противном случае система будет неустойчивой. [c.543]
У статических регуляторов (рис. 18,г) установившееся значение вырдного параметра У однозначно ( жестко ) определяется величиной входного параметра X. При регулировании они дают статическую ошибку (см рис. 7, в). [c.35]
Сопоставляя переходные характеристики П-регулятора и ПД-регулятора видим, что у ПД-регулятора отклонения регулируемого параметра меньше (более быстрое затухание процесса). Поэтому если колебания параметра в переходном процессе у П-регулятора выходят за допустимые пределы, то следует выбрать ПД-регулятор. Для уменьшения статической ошибки применяют интегральные регуляторы (рис. 25, е). Однако при большой скорости РО они дают долгр не затухающий переходный процесс. При малой скорости РО возникают слишком большие отклонения регулируемого параметра в переходном процессе (показаны пунктиром). Поэтому И-регуляторы целесообразно применять в случаях, когда нагрузка меняется очень редко и решающую роль играет не переходный процесс, а установившееся состояние. [c.51]
Статическая характеристика регуляторов. По установившемуся значению регулируемого параметра различают регуляторы статические (пропорциопальные) и астатические (простые и изодромные). У статич. регулятора имеется монотонная связь между воспринимаемым им установившимся значением регулируемого параметра и положением регулирующего органа. Напр., в регуляторе уровня жидкости (в резервуаре) воспринимающий элемент (поплавок) связан системой рычагов с золотником задвижки на линии подачи жидкости в резервуар. Если изменится нагрузка объекта (расход жидкости из резервуара), то для приведения его к новому установившемуся состоянию нужно в том же направлении и на столько же изменить подачу в резервуар, т. е. нужно соответственно передвинуть золотник задвижки. Когда последний займет новое положение, при к-ром поступление и расход жидкости уравняются, поплавок, связанный рычажной системой с золотником задвижки, окажется уже в новом положении, отличающемся от исходного. Соответственно этому изменится и уровень жидкости в резервуаре. Следовательно, статич. регулятор не может обеспечить постоянства регулируемого параметра на заданном уровне при переменной нагрузке объекта (при этом возникает статич. ошибка регулирования). У астатич. регулятора нет непосредственной постоянной связи между установившимися значениями регулируемого параметра и положением регулирующего органа. Поэтому при изменении нагрузки не возникает статич. ошибка регулирования, и равновесие подобного регулятора имеет место лишь в случае, когда действительное значение [c.285]
Статическая ошибка регулирования (отклонение регулируемого параметра от заданного значения последостижения САР нового установившегося состояния). Возмущающие воздействия могут быть приложены к любому звену САР, но важнейшими являются возмущения, приложенные к входу объекта (изменения нагрузки) или к входу регулятора (его перенастройка). Возмущающее воздействие, приложенное к объекту регулирования, считается положительным, если приводит к увеличению регулируемого параметра. Увеличение нагрузки объекта уменьшает регулируемый параметр и является поэтому отрицательным возмущением снижение нагрузки приводит к увеличению качественного показателя и является положительным возмущением. Если возмущение скачком приложено к входу объекта, то при установке астатич. регулятора статич. ошибка равна пулю (для любых объектов регулирования). Подобная САР наз. астатической относительно возмущения, приложенного к объекту (т.е. по нагрузке). При установке статич. регулятора и возмущениях, приложенных к входу объекта, всегда имеется статич. ошибка. Подобная ( АР наз. статической относительно возмущения, приложенного к объекту. Величина статич. ошибки равна ири статич. объекте регулирования [c.290]
О качестве системы удобно судить по переходному процессу, т. е. по процессу регулирования, вызванному стуиенчатым изые-нениег.1 нагрузки (рис. 69). Примером ступенчатого изменения нагрузки может служить включение лампочек в холодильной камере. Если нагрузки от М о резко возросла до Л4 ь то ДХ начинает увеличиваться. Регулятор увеличивает Мр, причем мол<ет оказаться Мр > М 1. Тогда X станет уменьшаться. Возникает колебательный процесс. При затухании колебаний X принимает новое установившееся значение Хуст- Отклонение этого значения от начального называют статической ошибкой [c.124]
Из статической характеристики И-регулятора (рис. 76, б) видно, что клапан может занять одно из промежуточных значений только при X = Хо. Так, при X > Хо клапан полностью открыт, а при X < Хо полностью закрыт. Отсюда видно, что в установившемся состоянии статическая ошибка АХст = X — Хо равна нулю, т. е. интегральные регуляторы относятся к классу астатических регуляторов. [c.131]
Для улучшения качества регулирования применяют регуляторы с более сложными законами регулирования пропорциональноинтегральные, которые в первый момент времени работают как П-регуляторы, но затем сводят к нулю статическую ошибку пропорционально-дифференциальные, которые реагируют не только на б 131 [c.131]
С увеличением тепловой нагрузки подача жидкости через ТРВ должна быть больше. А это возможно лишь при большем перегреве (точка Б ), т. е. испаритель немного недозаполнен. А с увеличением давления Рк пропускная способность ТРВ увеличивается, и требуемая производительность будет обеспечена при меньшем перегреве (точка Б»). Таким образом, ТРВ, как всякий П-регулятор, дает некоторую статическую ошибку. [c.149]
У регуляторов с высокой чувствительностью (например, с мягкой пружиной) статическая ошибка значительно меньше, но в переходном процессе возникают долго не затухаюш,ие колебания с большими отклонениями параметров в начале процесса. [c.131]
Устройство, монтаж и ремонт холодильных установок Издание 4 (1985) — [
c.129
,
c.130
,
c.131
,
c.132
]
Устройство, монтаж и ремонт холодильных установок Издание 4 (1986) — [
c.129
,
c.130
,
c.131
,
c.132
]
Содержание
- Что такое ПИД регулятор?
- Как работают значения PID, их изменение
- Усиление P
- Усиление I
- Усиление D
- Назначение ПИД регулятора
- Пример схемы регулирования температуры
- Три коэффициента ПИД регулятора и принцип работы
- Не все проблемы из-за плохих настроек PID
- Вибрация
- Центр тяжести (CG)
- Настраивание ПИД-регулятора общего вида
- Регулятор пропорционального типа
- Регулятор интегрального типа
- Регулятор дифференциального типа
- ПИД-регулятор
- Пример
- Формула ПИД-регулятора
- Настройка ПИД регулятора
- Как настроить PID по шагам
- Составляющие сигнала ПИД-регулятора
- Настройки ПИД-регулятора
- Пример применения ПИД-регулятора в частотно-регулируемом приводе насоса
- Вопрос: «Какие у тебя ПИДы?» — неправильный вопрос!
- Примечания и советы
- Death Rolls (крен смерти)
- Дополнительная информация для версии BetaFlight 3 (3.0 и 3.1)
- Формула ПИД-регулятора
- Когда нужно перенастраивать PID?
Что такое ПИД регулятор?
ПИД-регулятор – это устройство, интегрированное в схему управления с обязательной обратной связью. Он предназначен для поддержания заданных уровней заданных значений, например температуры воздуха.
Устройство подает управляющий или выходной сигнал на управляющее устройство на основе данных, полученных от датчиков или датчиков. Контроллеры обладают высокими показателями точности переходных процессов и качества выполнения задачи.

Как работают значения PID, их изменение
Обычно изменение значений PID (усиления) влияет на поведение квадрокоптера:
Усиление P
P определяет, насколько сильно полетный контроллер исправляет ошибки для достижения желаемой траектории полета. Этот параметр регулирует чувствительность и реакцию на изменение положения стика. Чем выше число, тем выше чувствительность и отзывчивость.
Более высокое значение P означает более резкое обращение, а более низкое значение P означает более плавное и плавное обращение. Но если это значение будет слишком высоким, дрон станет слишком чувствительным и начнет корректировать себя, а значения положения стика также начнут колебаться.
Вы можете снизить P, чтобы уменьшить колебание, но дрон не будет четко следовать вашим командам, поэтому вам придется поиграть с I и D, чтобы это компенсировать.
Усиление I
Значение I определяет, сколько квадрокоптер выдержит при воздействии внешних факторов, например, ветра и смещения центра тяжести.
Это настройка жесткости при повороте коптера.
Обычно настройки по умолчанию работают с этим довольно хорошо, но если вы заметили некоторый дрейф в дроне без вашей команды, немного увеличьте значение I. Если значение слишком низкое, вам часто потребуется скорректировать траекторию полета дрона, особенно если вы часто меняете уровень газа.
Если значение I слишком велико, квадрокоптер будет вести себя «деревянным», он плохо отреагирует на ваши изменения положения стика на пульте дистанционного управления. Нет регулятора, двигателя и пропеллера, каждый по отдельности, но он работает по-своему, поэтому, когда вы резко дросселируете, а затем резко опускаете ручку газа, один двигатель останавливается быстрее, чем другой, и наоборот, все из которых вызывает сбой в положении квадрокоптера в воздухе, один двигатель все еще имеет тягу, а другой нет.
Итак, я привык решать эти мелкие проблемы.
Усиление D
D действует как демпфер (глушитель, демпфер) и снижает чрезмерную коррекцию и регулировку усиления P. Увеличение значения D смягчает эффект P, как будто добавляя «пружину», а также минимизирует вибрацию гребного винта.
Если D слишком мало, дрон будет “отскакивать” назад в конце переворотов и кувырков, а также будет сильная вибрация, вызванная вертикальным спуском.
Слишком большое значение также приводит к вибрациям. Пытаясь стабилизировать квадрокоптер, полетный контроллер будет давать команду контроллерам скорости увеличить скорость двигателей, а затем уменьшить их до такой скорости (в смысле более медленной), что двигатели будут перегреваться и перегорать. Вибрация также повлияет на полетный контроллер, и со временем ситуация ухудшится.
Еще один побочный эффект D – квадрокоптер становится «мягким», то есть реакция на команды слишком медленная.

Назначение ПИД регулятора
ПИД-регулятор предназначен для поддержания определенного значения на требуемом уровне: температуры, давления, уровня в резервуаре, расхода в трубопроводе, концентрации чего-либо и так далее, путем изменения управляющего воздействия на исполнительные механизмы, такие как автоматический клапан управление с помощью пропорционального интеграла, дифференцирующего значения для его регулирования.
Целью использования является получение точного управляющего сигнала, который может управлять крупными производствами и даже реакторами электростанций.
Пример схемы регулирования температуры
Часто ПИД-регуляторы используются при регулировании температуры, давайте рассмотрим этот автоматический процесс на простом примере нагрева воды в резервуаре.
В емкость наливается жидкость, которую необходимо нагреть до нужной температуры и поддерживать на определенном уровне. Внутри емкости установлен датчик измерения температуры – термопара или термометр сопротивления и подключается непосредственно к ПИД-регулятору.
Чтобы нагреть жидкость, мы подадим пар, как показано на рисунке ниже, с автоматическим регулирующим клапаном. Сам клапан получает сигнал от регулятора. Оператор вводит значение уставки температуры в ПИД-регулятор, которое должно поддерживаться в резервуаре.

При неправильной настройке коэффициентов регулятора будут скачки температуры воды, при этом клапан будет полностью открыт, а затем полностью закрыт. В этом случае необходимо рассчитать коэффициенты ПИД-регулятора и ввести их заново. Если все было сделано правильно, через короткий промежуток времени система выровняет процесс, и температура в резервуаре будет поддерживаться на заданном уровне, а степень открытия регулирующего клапана будет в центральном положении.
Три коэффициента ПИД регулятора и принцип работы
Задача ПИД-регулятора – обеспечить выходной сигнал о мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для расчета показателя используется сложная математическая формула, в которую входят 3 коэффициента: пропорциональный, интегральный, дифференциальный.
Возьмем за объект регулирования емкость с водой, в которой необходимо поддерживать температуру на заданном уровне, регулируя степень открытия клапана паром.
Пропорциональная составляющая появляется в момент несоответствия входным данным. Проще говоря, это звучит так: берется разница между фактической температурой и желаемой температурой, умножается на регулируемый коэффициент, и получается выходной сигнал, который следует отправить на клапан. Те, как только градусы упали, начинается процесс нагрева, поднимается выше нужной отметки – отключение или даже охлаждение.
Далее идет интегральный компонент, предназначенный для компенсации влияния окружающей среды или других мешающих воздействий на поддержание нашей температуры на определенном уровне. Поскольку всегда есть дополнительные факторы, влияющие на управляемые устройства, к моменту поступления данных для расчета пропорциональной составляющей данные уже меняются. И чем больше внешнее влияние, тем сильнее происходят колебания показателя. Возникают всплески тока.
Интегральный компонент пытается на основе прошлых значений температуры вернуть свое значение, если оно изменилось. Более подробно процесс описан в видео ниже.
А затем выдается выходной сигнал регулятора, в зависимости от коэффициента, на повышение или понижение температуры. Со временем выбирается величина, компенсирующая внешние факторы, и скачки исчезают.
Интеграл используется для устранения ошибок путем вычисления статической ошибки. Главное в этом процессе – правильно выбрать коэффициент, иначе погрешность (несовпадение) затронет и интегральную составляющую.
Третий компонент PID – дифференциация. Он предназначен для компенсации влияния задержек, возникающих между воздействием на систему и обратной связью. Пропорциональный контроллер подает питание до тех пор, пока температура не достигнет желаемого уровня, но при передаче информации на устройство, особенно при высоких значениях, всегда возникают ошибки. Это может привести к перегреву. Дифференциал предсказывает отклонения, вызванные задержками или влиянием окружающей среды, и заранее снижает мощность, подаваемую на него.
Не все проблемы из-за плохих настроек PID
Перед изменением PID следует также посмотреть другие данные:
Вибрация
Не все вибрации вызваны высоким значением P. Перед настройкой PID следует максимально устранить источники вибрации на дроне. Например, баланс двигателя и стойки, жесткость рамы и т.д.
Центр тяжести (CG)
Центр тяжести должен быть точно посередине между всеми 4 двигателями. Плохая центровка приведет к тому, что некоторые двигатели будут работать сильнее, чем другие, что приведет к перегреву двигателя и плохой устойчивости полета. Например, аккумулятор находится сзади, а не в центре, поэтому задние двигатели будут работать на 100%, а передние двигатели – на 80%. Вся масса на дроне должна быть отцентрирована и равномерно распределена. По этой причине X-образные оправы являются наиболее популярными.
Настраивание ПИД-регулятора общего вида
Для поддержания этого давления есть устройство, называемое эталонным регулятором. Давление в трубопроводах к датчику сравнивается с заданным параметром давления. Регулятор сравнивает давление в системе с эталонным давлением и определяет целевую скорость двигателя, чтобы изменить ошибку. В контроллере простого типа применяется план действий ПИД-регулирования. Он использует три составляющих типа регуляторов для устранения ошибок: дифференциальный, интегральный и пропорциональный регулятор.

Регулятор пропорционального типа
Такой регулятор является основным, скорость выставляется прямо пропорционально погрешности. При использовании пропорционального регулятора в системе будет ошибка. Малые значения коэффициента пропорционального регулятора приводят к замедлению работы системы, а высокие параметры приводят к колебаниям и нестабильности системы.

Регулятор интегрального типа
Этот регулятор используется для устранения ошибки. Скорость будет увеличиваться, пока ошибка не будет устранена (при отрицательной ошибке она будет уменьшаться). Небольшие значения суммирующей составляющей слишком сильно влияют на деятельность регулятора в целом. Когда устанавливаются большие значения, система перескакивает, работает с перерегулированием.

Регулятор дифференциального типа
Этот регулятор измеряет скорость исправления ошибок, использует ее для увеличения скорости системы и увеличивает скорость регулирования в целом. При увеличении скорости регулятора перерегулирование увеличивается. Это приводит к системной нестабильности. Во многих случаях производная становится равной нулю или приближается к наименьшему значению, чтобы избежать этого условия. Это полезно в системе позиционирования.

ПИД-регулятор
С помощью настройки ПИД-регулятора мы можем настроить переходный процесс, необходимый для решения нашей проблемы.
Hzad – указанное (желаемое) значение выходной переменной
Xmax – допустимый верхний предел выходной переменной
Xmin – допустимый нижний предел выходной переменной
Т – период колебания
Н – время нарастания
Tr – переходное время (последняя точка пересечения кривой с Xmin или Xmax)
A1 – первый промах
A2 – второй перерегулирование
d = A1 / A2 – степень (уменьшение) сглаживания переходного процесса (отношение первого перебега ко второму)
Несовпадение, перерегулирование, время нарастания, время переходного процесса, коэффициент затухания характеризуют качество регулирования.
Пример
ПИД-регулятор открывает и закрывает регулирующий клапан на горячей трубе, чтобы вода с температурой + 40 ° C текла из крана с погрешностью плюс-минус 2 градуса. Контроллер вычисляет несоответствие (погрешность) – отклонение фактической температуры (например, + 20 ° C) от заданного значения (+ 40 ° C) и решает, когда и на сколько необходимо открыть горячий клапан, чтобы температура увеличивается на 20 ° C. Контроллер распознает реальную (фактическую) температуру через датчик температуры (обратная связь), и оператор сообщает ему установленную температуру (заданное значение), например, путем набора номера «40» на своем ПК.
Для настройки ПИД-регулятора нужно правильно подобрать комбинацию из трех коэффициентов:
- Пропорциональный – Kp
- Интегральный – Ki
- Дифференциал – Kd
Также можно использовать более простые П- и ПИ-регуляторы.
Формула ПИД-регулятора
где e (t) – ошибка (рассогласование), u (t) – выходной сигнал регулятора (управляющее воздействие).
Чем выше коэффициент пропорциональности, тем выше производительность, но меньше запас устойчивости. Но! простой P-контроллер не может полностью справиться с несоответствием, т.е всегда выходит из строя.
ПИ-регулятор устраняет статическую ошибку (установившееся состояние), но чем выше интегральный коэффициент, тем больше перерегулирование (динамическая ошибка).
ПИД-регулятор позволяет уменьшить перерегулирование, но чем больше коэффициент дифференциала, тем больше ошибка из-за влияния шума.
Если шум проходит через канал обратной связи, мы можем отфильтровать его с помощью низкочастотного фильтра, но чем выше постоянная этого фильтра, тем медленнее регулятор будет устранять шум.
Настройка ПИД регулятора
Настройка ПИД-регулятора осуществляется двумя способами:
- Синтез включает расчет параметров на основе модели системы. Этот параметр точен, но требует глубокого понимания теории автоматического управления. Это подвластно только инженерам и ученым. Так как необходимо снять характеристики потока и произвести ряд расчетов.
- Ручной метод основан на пробах и ошибках. Для этого за основу берутся данные готовой системы, вносятся изменения в один или несколько коэффициентов регулятора. После включения и наблюдения за конечным результатом параметры меняются в желаемом направлении. И так до тех пор, пока не будет достигнут желаемый уровень производительности.
Теоретический метод анализа и настройки на практике используется очень редко, что связано с незнанием характеристик объекта управления и массой возможных мешающих воздействий. Чаще встречаются экспериментальные методы, основанные на наблюдении за системой.
Современные автоматизированные процессы реализованы в виде специализированных модулей под управлением программ настройки коэффициентов регулятора.
Как настроить PID по шагам
- Убедитесь, что двигатели сбалансированы и самолет максимально свободен от вибраций. Попытка настроить PID без «чистого» гироскопа (балансировка и подавление вибрации выполняются, чтобы гироскоп работал без помех), все равно что построить дом без хорошего фундамента. В этом видео вы узнаете, как легко контролировать вибрацию. При необходимости отрегулируйте настройки фильтра нижних частот, чтобы получить чистый «гироскопический сигнал.
- важно, чтобы этот шаг выполнялся в режиме Acro, даже если вы всегда летаете в режиме стабилизации / горизонта. Режимы «Угол Горизонт» имеют собственное значение и влияют на ПИД-регулирование. Пример параметра PID ниже соответствует Rewrite PID (PID Controller # 1). При выполнении этой начальной настройки установите значение APT на 0. При необходимости вы можете добавить APT позже.
- Начните с внесения небольших изменений в настройки по умолчанию и начните с фактора P. Хорошей отправной точкой будет P для Pitch and Roll 4.0. Кроме того, уменьшите I и D для Pitch and Roll, чтобы отрегулировать P с минимальным шумом. Поэтому рекомендуется установить I равным 20 и D равным 5. Для рыскания рекомендуется взять значение по умолчанию, разделить на 2 и немного уменьшить значение I, чтобы исключить эту ось как источник колебаний. Рыскание настраивается последним.
- Во время тестовых полетов увеличивайте параметр P на оси крена до тех пор, пока вы не заметите колебание по мере приближения к максимуму и не услышите видимое и слышимое колебание. Затем установите параметр P примерно на 70% от значения, вызвавшего колебания. Теперь я думаю, понятно, почему, не имея опыта полетов на конкретном квадрокоптере, вы не сможете настроить его PID?
- Повторите шаг 4 для оси наклона.
- Проверьте, сохраняет ли квадрокоптер необходимый угол крена и не двигается ли он во время крена, затем несколько раз резко дайте газу и резко отпустите его до 0. Обратите внимание: угол крена, который вы делали до того, как поиграть с дросселем, не должен существенно измениться. Если угол отклонения кажется вам очень отклоненным (дрон начал дрейфовать), увеличьте параметр I. Если все в порядке и дрейфа нет, не меняйте I. Вы можете изменить “ощущение” подъема дрона или понижение параметра I после достижения хороших настроек PID, поскольку I не влияет на окончательные значения P и D.
- Повторите шаг 6 для оси наклона.
- Параметр D следует увеличивать на каждой оси ТОЛЬКО до такой степени, чтобы это помогало уменьшить отдачу после переворота и крена (переворот – переворот вбок, кувырок – перевернутый вверх ногами), а также после колебаний после свободного падения при ускорении до 0 и дрон падает, значит, вы включаете двигатели на газе, и они начинают, так сказать, падать в воздухе, и в этот момент дрон начинает раскачиваться из стороны в сторону. Когда эти проблемы исчезнут при увеличении параметра D, уменьшите этот параметр до 80-90% от этого уровня.
Примечание: слишком высокое значение параметра D может привести к перегреву двигателей. Для контроля прогрева нужно 20-30 секунд лететь, приземляться и управлять моторами руками. Если вы можете держать моторы пальцами, они не сильно нагреваются.
- Часто установка рыскания не нужна или будет минимальной, так как она все равно может вызывать колебания, если ничего не предпринимать.
Начните с Yaw P и проверьте вибрацию дрона, как в первом шаге, а также убедитесь, что нет вибрации, если вы даете сильный и длинный газ или быстро двигаетесь вперед
Начинайте увеличивать рыскание P с шагом 5, пока не увидите на видео камеры вибрации при полете вперед или на полном газу. Затем немного уменьшите значение.
Теперь нам нужно взглянуть на данные в черном ящике. Yaw P, скорее всего, будет немного раскачиваться, поэтому попробуйте увеличить гироскоп Yaw, чтобы увидеть, действительно ли колебания достигают гироскопа. Если гироскоп по рысканью выглядит более-менее ровно, значит, все в порядке.
Примечание. Поскольку рыскание по своей сути имеет меньший контроль по тангажу и крену, для этой оси существует широкий диапазон значений. P и я могли быть высокими, а D – низкими, это нормально.
- Теперь необходимо отрегулировать соотношение P к I, то есть будет ли квадрокоптер сопротивляться в крутых поворотах или, наоборот, отказывать в этих поворотах. Очень низкие значения I со временем приводят к осевым смещениям. Низкие значения I на оси также позволяют вам свободно менять положение, но при этом сохранять это положение. Более высокие значения оси будут держать дрон в хорошем состоянии, но могут иметь тенденцию сопротивляться движению + добавляется небольшой накат. Очень высокие значения означают «роботизированные» движения и колебания дрона.
- После завершения настройки в режиме Acro вы можете перейти к настройкам других режимов, например Horizon).
Помните, что вам не нужно слишком глубоко копаться в журналах Blackbox, чтобы точно настроить идеальные PID. Если квадрокоптер хорошо летает и вас все устраивает, летите и летайте 
Составляющие сигнала ПИД-регулятора
Управляющий сигнал, генерируемый ПИД-регулятором, представляет собой сумму трех компонентов:
- Пропорционально.
- Интеграл.
- Дифференциальный.

Пропорциональная составляющая формируется исходя из разницы между заданным значением параметра и его фактическим значением. Чем больше отклонение характеристики, тем выше уровень пропорционального сигнала. Устройства, управляющие системой, называются П-регуляторами только по пропорциональному закону.

Основным недостатком такой настройки является статическая погрешность, указывающая на величину остаточного отклонения параметра. Пропорциональные регуляторы имеют ограниченную точность.
Для его устранения был введен интегральный компонент. Он пропорционален интегралу по времени отклонения значения контролируемой характеристики.
Если параметр отклоняется, пропорциональная составляющая возвращает его к предыдущему значению. Уровень выходного сигнала стремится к нулю, однако из-за статической ошибки регулируемый параметр не достигает заданного значения. Интегральный компонент обеспечивает компенсацию ошибок и позволяет характеристике вернуться к заданным значениям.
Пропорционально-интегральное управление имеет низкую скорость и не подходит для регулирования динамических систем. Накопление и сумма ошибок приводит к увеличению управляющего сигнала. Система может «сойти с ума».

Для увеличения быстродействия в конструкцию регулятора введена дифференциальная составляющая. Он увеличивается и уменьшается пропорционально скорости изменения контролируемого параметра.

Следовательно, результирующий сигнал на выходе ПИД-регулятора можно определить по выражению:

где Kp, Ki, Kd – пропорциональные, интегральные, дифференциальные коэффициенты соответственно, а (t) – ошибка рассогласования.
Настройки ПИД-регулятора
Настройка ПИД-регулятора сводится к определению коэффициентов Kp, Ki, Kd. Компоненты определяются по формуле:

Они используются для определения передаточных функций системы автоматического управления и расчета их параметров:
- Точность.
- Скорость регулировки.
- Форма графиков переходных процессов.
- Инерция.
- Прочие количества и функции.
Математическая модель АТС не может дать полной картины функционирования системы. Расчеты выполнены для «идеального регулятора». Нелинейность контролируемых параметров, внешние возмущения, шумы на объекте управления не позволяют применять расчетные данные для построения системы автоматического управления на практике. Результаты математических расчетов используются в качестве вспомогательных данных.
При разработке контроллеров ПИД и СКУД используется оборудование, моделирующее изменение контролируемых характеристик, средства измерений и ПК. Устройства позволяют определять и анализировать реакцию системы на удары и с большей точностью выбирать коэффициенты.
На практике используется экспертный подбор коэффициентов. ПИД-регуляторы устанавливаются на месте, вводят коэффициенты, полученные в результате расчетов или стендовых испытаний, и регулируют параметры на месте.
Пример применения ПИД-регулятора в частотно-регулируемом приводе насоса
Цепи преобразователя частоты содержат контроллеры управления, которые могут обеспечивать работу устройства в режиме ПИ- или ПИД-регулятора. Пользователи частоты часто уже имеют предустановленные настройки, которые изменяются после установки оборудования.

На рисунке показана простейшая схема регулирования давления ПИД-насоса. Аналоговые входы подключены к датчику, установленному на напорном трубопроводе, и к внешнему приводу. Требуемое значение давления также можно установить в настройках контроллера. Когда регулируемый параметр изменяется на контроллере, который сравнивает сигнал обратной связи с установленным значением, генерируется управляющий сигнал.
Преобразователь изменяет производительность насоса, увеличивая или уменьшая частоту напряжения питания электродвигателя до тех пор, пока давление в системе не достигнет установленного значения. Следовательно, давление в системе не зависит от расхода.
Приведенная выше диаграмма значительно упрощена. Преобразователи частоты с ПИД-регулятором могут управлять производительностью несколькими способами. Например, насосы в системах отопления можно регулировать по температуре теплоносителя, а также по тепловому режиму и давлению снаружи и внутри помещения.
Преобразователи частоты с функциями ПИД-регулирования также используются в сложных системах управления для систем наддува и других систем управления технологическими процессами.
Вопрос: «Какие у тебя ПИДы?» — неправильный вопрос!
Использовать чужие PID на своем квадрокоптере совершенно бесполезно. Каждый дрон уникален, его оборудование и даже ветер и климат влияют на регулирование PID.
Примечания и советы
В журналах черного ящика высокие колебания P не проявляются в виде резких пиков или больших волн. Эти колебания сначала появляются в верхней части газового диапазона и выглядят как узкие синусоидальные волны. Когда они появляются в журналах, они еще не видны визуально или на слух, поэтому во время начальной настройки (визуальной и на слух) рекомендуется сначала достичь точки визуальных и слуховых колебаний, а затем уменьшить значения. До 70%. Когда все колебания видны визуально или на слух, они также будут четко отображаться в журналах.
Death Rolls (крен смерти)
Самая распространенная причина, по которой квадрокоптер переворачивается и не выключает свои двигатели, заключается в том, что дроссельная заслонка слишком низкая. Регулятор не может запустить двигатель после команды с низким значением газа (газ был на 0 в течение некоторого времени). В журнале черного ящика двигатель работает на полном газу, но дрон продолжает вращаться. Первое, что нужно сделать, это увеличить настройку min_throttle (значение параметра Idle% при работе протокола DSHOT).
Вторая причина – неисправный мотор, или плохой ESC, или даже ослабленное крепление шасси. В этом случае в журналах Blackbox вы увидите, что двигатель работает на полную мощность, но радиус шасси уменьшается (если включен акселерометр), что указывает на то, что двигатель не имеет тяги. Для проверки замените двигатель или регулятор.
Третья причина – неудачная комбинация ESC мотор. Некоторые регуляторы просто не могут работать с современными двигателями. Здесь поможет только замена ESC на другой.
Дополнительная информация для версии BetaFlight 3 (3.0 и 3.1)
- Настройки PID по умолчанию очень хорошо настроены и работают на большинстве дронов и требуют лишь незначительных корректировок.
- Параметр P Roll и Pitch может быть довольно высоким без дальнейших колебаний, поэтому их можно увеличивать до тех пор, пока те же колебания не исчезнут, когда они присутствуют. Этот параметр можно поднять до максимального предела, если у вас D минимум, и вы не получите новых колебаний при резком управлении стиками.
- Регулировка скорости рыскания может потребовать регулировки нижнего предела yaw_accel_limit и yaw_p_limit, особенно для двигателей большой мощности и высоких значений KV.
- Некоторые мощные системы и сборки не работают с PID по умолчанию и требуют настройки с нуля, как описано в предыдущих шагах, например, DJI Snail System:
Еще у нас есть старая статья, может быть, вы тоже найдете что-нибудь полезное для себя: что такое PID, на что он влияет и как его настроить.
Формула ПИД-регулятора
Как и обещал, формул тут не будет . ну почти нет. И этот раздел будет просто формулой. Обещаю, формул больше не будет! Так что наберитесь терпения!
Итак, формула для ПИД-регулятора:
(по мотивам Википедии)
Здесь у нас есть следующие буквы (мы объясним немного ниже):
- u (t) – наша функция;
- П – пропорциональная составляющая;
- I – составной компонент;
- D – дифференциальная составляющая;
- e (t) – текущая ошибка;
- Kp – коэффициент пропорциональности;
- Ki – интегральный коэффициент;
- Kd – дифференциальный коэффициент;
Все, расслабьтесь – эта формула нам больше не понадобится в работе, она для уточнения сути.
И суть в следующем.
У нас есть влияние, наша Функция (u (t)). Он состоит из трех компонентов: пропорционального, интегрального и дифференциального (отсюда и ПИД-регулятор).
Формула в приведенном выше виде хороша для изучения, но неудобна для расчетов (хотя бы потому, что в расчетах необходимо переходить на численные методы). В программной реализации, согласно этой статье, переходят к дискретной реализации:
u (t) = P (t) + I (t) + D (t);
P (t) = Kp * e (t);
I (t) = I (t – 1) + Ki * e (t);
D (t) = Kd * {e (t) – e (t – 1)};
Это уже кажется намного более реальным и понятным! Давайте посчитаем сумму трех составляющих. Каждый из них определяется своими коэффициентами. Если этот коэффициент равен нулю, компонент не участвует в расчетах. Мы будем дальше работать с этой формулой, и я буду ее реализовывать.
Однако есть и другая повторяющаяся реализация:
u (t) = u (t – 1) + P (t) + I (t) + D (t);
P (t) = Kp * {e (t) – e (t – 1)};
I (t) = I * e (t);
D (t) = Kd * {e (t) – 2 * e (t – 1) + e (t – 2)};
Что лучше / правильно? Математика в основном такая же. Даже шансы. Говорят, что при реализации будет несколько подводных камешков.
Примечание! Коэффициенты здесь обязательно дробные! В языке программирования C – хотя бы одно число с плавающей запятой, а лучше бы double.
В этих коэффициентах заключается вся магия ПИД-регуляторов. Как их выбрать – увидим в конце. А теперь давайте отвлечемся от математики и пойдем изучать поведение этой формулы.
Все расчеты и моделирование я сделал на модели в Excel. Это – файл – прикреплен ниже, вы можете воспроизвести его сами. Модель чисто для ознакомления с идеей! То есть не нужно пытаться воплотить его в какой-то реальный процесс, искать в нем научный смысл и т.д. Там все цифры слегка «от лампы». Но зато файл простой и незамысловатый. И он быстро моделируется. И это дает возможность понять суть ПИД-регулятора. Напоследок несколько слов о файле.
Когда нужно перенастраивать PID?
Почти все компоненты в квадрокоптере влияют на PID, поэтому, когда вы меняете компонент, также настраивайте PID. Если вы изменили время цикла в Betaflight и Cleanflight, вам также потребуется настроить PID.
Действительные
значения регулируемой величины в
реальных САР отличаются от предписанных.
Разность между предписанным и
действительным значениями регулируемой
величины называется ошибкой
регулирования.
∆xз(t)
= xз
– x(t)
– ошибка регулирования
хз
– предписанное (заданное) значение
управляемой величины;
x(t)
– ее текущее значение
В
процессе функционирования САР может
переходить от одного состояния,
принимаемого за исходное, в другое.
Разность между текущими значениями
регулируемой величины и значением,
соответствующим исходному состоянию,
принято называть отклонением регулируемой
величины
∆x0(t)
= x(t)
– x0(t) (1.3)
где
xo
– значение регулируемой величины в
исходном состоянии.
x0(t)
– исходное значение регулируемой
величины.
|
|
|
Рис. |
1.4. Статическое и астатическое регулирование
В
зависимости от того, является или нет
ошибка регулирования функцией возмущающего
воздействия в установившемся режиме,
различают статическое
и астатическое
регулирование.
При
статическом регулировании ошибка
регулирования возрастает с увеличением
значения возмущающего воздействия.
Пример статического регулирования
приведен на рис. 1.4, а).
|
|
|
а) |
|
|
|
б) |
|
|
|
в) |
|
Рис. |
Принцип
действия этого регулятора достаточно
ясно виден из рассмотрения схемы и
особых пояснений не требует. Заметим
лишь, что требуемого возбуждение
генератора 1 осуществляется путем
изменения входного сигнала (ΔU)
электронного усилителя 2. В свою очередь
этот сигнал пропорционален отклонению
регулируемого параметра Uг
от заданного значения Uзад
(ΔU=Uг–Uзад).
Поэтому такое отклонение, т.е. наличие
ΔU,
является неизбежным и должно быть тем
больше, чем больше изменяется величина
внешнего возмущения Pг.
Очевидно, что это отклонение регулируемого
параметра от заданного значения
сохраняется также и в установившемся
режиме.
Рабочая
характеристика (зависимость напряжения
генератора от нагрузки – активной
мощности Pг)
статического регулятора приведена на
рис. 1.4, б).
На
рис. 1.4, в)
показан переходный процесс в системе
при уменьшении нагрузки генератора.
Регулированием
с астатической
характеристикой
называется такое регулирование, при
котором в установившемся состоянии
системы отклонение регулируемого
параметра от заданного значения равно
нулю при любой величине внешнего
возмущения. Равновесие системы имеет
место всегда при заданном значении
регулируемого параметра.
Пример
астатического регулирования приведен
на рис. 1.5, а).
|
|
|
а) |
|
|
|
б) |
|
|
|
в) |
|
Рис. |
Характеристика
астатического регулятора приведена на
рис. 1.5, б),
а кривая переходного процесса – на рис.
1.5, в).
При
увеличении нагрузки на генераторе, т.е.
увеличении активной мощности генератора
Pг,
уменьшается напряжение на его выводах
Uг,
что приводит к появлению отклонения
регулируемого параметра Uг
от заданного значения Uзад
(ΔU=Uг–Uзад).
Параметр Uзад
задается
регулировочным реостатом 5. При этом
появляется напряжение на якоре двигателя
постоянного тока Uвых,
и двигатель начинает перемещать контакт
регулировочного реостата 4 по часовой
стрелке, что приводит к увеличению тока
возбуждения генератора IОВ1,
а значит, и напряжения на его выводах
Uг.
Параметр Uг
будет увеличиваться до тех пор, пока
ошибка регулирования ΔU
не станет равной 0.
Астатические
САР обеспечивают высокую точность
регулирования. Однако по сравнению со
статическими они являются более сложными
и инерционными, т.е. процессы регулирования
в них являются замедленными.
1.5.
Линейные и нелинейные системы. Линеаризация
уравнений
Системы,
процессы в которых могут быть описаны
линейными дифференциальными уравнениями
с постоянными коэффициентами, называются
линейными.
Для линейных систем применим принцип
суперпозиции, позволяющий рассматривать
независимое прохождение воздействий,
что дает существенное упрощение (рис.
1.6).
|
|
|
Рис. |
Нелинейной
называется система, для описания
процессов в которой приходится применять
одно или несколько нелинейных уравнений.
К нелинейным относятся уравнения,
коэффициенты которых зависят от значений
переменных величин или их производных,
а также уравнения, содержащие произведения
или степени (выше первой) этих величин.
Строго
говоря, линейных САУ в технике практически
нет или очень мало. Однако большинство
систем при определенных условиях могут
рассматриваться как линейные. Так, если
оценивать поведение системы при малых
отклонениях величин от исходных значений,
то в большинстве случаев имеющей место
нелинейностью можно пренебречь. Такая
возможность имеет математическое
обоснование.
Пусть
имеем некоторую непрерывную функцию
F(x)
(рис. 1.7).
Если
аргумент X
получил приращение ΔX
от исходного значения Xo,
то функция получит приращение ΔF(X).
Новое значение функции F(X)
можно разложить в ряд Тейлора:
Рис.
1.7. Пример линеаризации нелинейной
функции
При
малых значениях Δx
можно ограничиться только первыми двумя
членами разложения, т.к. остальные имеют
более высокий порядок малости, т.е. можно
считать
![]() ,
,
где
![]() .
.
Теоретически
это означает, что на интервале ±Δx
(рис. 1.6) кривая F(x)
заменяется прямой линией, являющейся
касательной при x=xo.
Таким
образом, если составлять уравнение
системы не для полных значений величин,
а только для отклонений, то эти уравнения
будут линейными. Такая операция называется
линеаризацией
уравнений.
Следует, однако, отметить, что это
справедливо только для тех случаев,
когда нелинейные функции являются
непрерывными и имеют непрерывные
производные при x=xo.
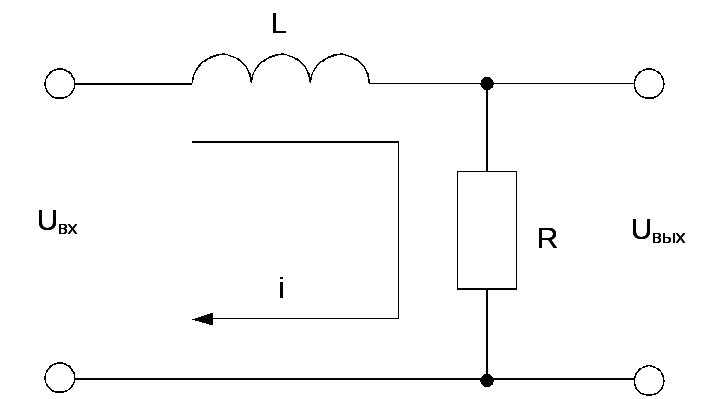
Пример
линеаризации нелинейного элемента
системы.
В
качестве типового элемента, уравнение
которого подлежит линеаризации, возьмем
RL-элемент,
часто встречающийся в электрических
системах регулирования и изображенный
на рис. 1.8, а). Пусть входной и выходной
величинами такого элемента являются
напряжения.
|
|
|
|
а) |
б) |
|
Рис. |
Предположим
сначала, что активные сопротивления и
индуктивность не зависят от протекающего
через них тока, т.е. будем считать, что
элемент является линейным.
Тогда
дифференциальное уравнение элемента
в случае, если потокосцепление
катушки
элементазависит от тока линейно, т.е.
если индуктивность L=/i
не зависит от тока и является величиной
постоянной, имеет вид:
![]()
Обозначив
![]()
и
![]() ,
,
учитывая, что
![]() ,
,
и пользуясь операторной (символической)
формой записи, в которой принято
![]() ,
,
получим:
|
|
(1.3) |
Предположим
теперь, что в рассматриваемом примере
индуктивность зависит от тока и,
следовательно, элемент является
нелинейным. Тогда уравнение (1.3) для
такого элемента неправомерно, ибо
потокосцепление
зависит от тока нелинейно и, следовательно,
L=/i
есть величина переменная. Для
усатновившегося режима элемента при
входном постоянном напряжении uвх
потокосцепление 0
тоже постоянно во времени и, следовательно,
![]() .
.
Тогда можно написать:
![]() .
.
Изменение
входного напряжения повлечет за собой
изменение тока и выходного напряжения.
Текущие
значения uвх
и uвых
и i
можно представить так:
![]() ;
;
![]() ;
;
![]() ,
,
где
Δuвх,
Δuвых
и Δi
– отклонения
соответствующих величин от их
установившихся значений.
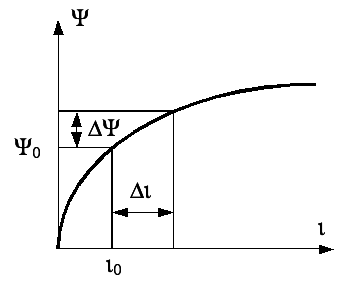
Пусть
потокосцепление является нелинейной
функцией тока, как это показано на рис.
1.8, б).
Эту функцию можно разложить в ряд:
|
|
(1.4) |
При
достаточно малых отклонения тока можно
ограничиться первыми двумя членами
ряда. Величина
![]()
определяется тангенсом угла наклона
касательной к кривой, приведенной на
рис. 1.8,б), в
точке с абсциссой i0.
Обозначив
динамическую индуктивность элемента
для тока i0
через Lд,
т. е.
![]() ,
,
можем написать:
![]() .
.
Так
как
![]() ,
,
то будем иметь:
![]() .
.
Исходное
уравнение запишется теперь так:
![]() ,
,
или,
подставляя ранее найденное выражение
для uвых0,
получим:
![]() .
.
Последнее
выражение является линейным дифференциальным
уравнением с постоянными коэффициентами,
которое можно записать в операторной
форме так:
|
|
(1.5) |
где
![]()
и k=1.
Оно
справедливо только для малых отклонений
входной и выходной величины относительно
начального значения uвх0.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Статическая ошибка — регулирование
Cтраница 2
И-регулятор не имеет статической ошибки регулирования, поскольку выход регулятора будет расти при любом малом значении рассогласования. Таким образом, в отличие от системы с П — регулятором системы с И-регулятором не имеют статической ошибки, но динамическая ошибка в этих системах большая. Это объясняется тем, что в начальный момент И-регулятор еще не успевает из-за своих инерционных свойств выработать значительный выходной сигнал.
[16]
И-регулятор не имеет статической ошибки регулирования, поскольку выход регулятора будет расти при любом малом значении рассогласования. Таким образом, в отличие от системы с П — регулято-ром системы с И-регулятором не имеют статической ошибки, но динамическая ошибка в этих системах большая. Это объясняется тем, что в начальный момент И-регулятор еще не успевает из-за своих инерционных свойств выработать значительный выходной сигнал.
[18]
И-регулятор не имеет статической ошибки регулирования, поскольку выход регулятора будет расти при любом малом значении рассогласования. Таким образом, в отличие от системы с П — регулятором системы с И-регулятором не имеют статической ошибки, но динамическая ошибка в этих системах большая.
[20]
Этот коэффициент равен отношению статической ошибки регулирования к установившемуся отклонению того же параметра в случае отсутствия регулятора.
[21]
Изменение скорости б называется статической ошибкой регулирования скорости.
[22]
Почему в статической АСР возникает статическая ошибка регулирования.
[23]
Для пропорционального закона регулирования характерна статическая ошибка регулирования Д, связанная с принципом регулирования — изменением положения регулирующего органа только при отклонении регулируемого параметра от заданной величины.
[25]
ВЫХо и, следовательно, статическая ошибка регулирования бст равна нулю.
[27]
Из этого выражения следует, что статическая ошибка регулирования увеличивается при росте отклонения регулируемой величины при работе без регулятора и уменьшается с ростом коэффициента усилителя разомкнутой системы.
[29]
САР на регулируемом объекте допускается наличие статической ошибки регулирования.
[30]
Страницы:
1
2
3
4
5
Основные причины возникновения
Причин, по которым может возникнуть неисправность датчика холостого хода P1505, на самом деле много. Так, к ним относится:
- Выход из строя предохранителя регулятора (например, отмечалось на автомобилях Пежо).
- Обрыв проводки от датчика до электронного блока управления двигателем или появление короткого замыкания на массу.
- Забитый топливный фильтр (из-за него в систему попадает мало топлива и машина попросту глохнет, может также сопровождаться возникновением ошибки P0089 — малое давление в топливной системе).
- Выход из строя непосредственно датчика холостого хода (или его отдельных частей, контактов).
- Лопнувший корпус регулятора холостого хода.
- Залипание датчика ХХ в одном положении, из-за чего он не позволяет двигателю набирать обороты.
- Плохой контакт на фишке датчика холостого хода (в тех моделях автомобилей, где она есть).
- Перебитый (перетертый) провод питания от аккумулятора (в частности, если провода идут в косе, то один или несколько проводов могут перетереться, а это может отразиться на работе как регулятора холостого хода, так и датчика абсолютного давления, если таковой установлен на машине).
- Увеличенное сопротивление сенсора регулятора холостого хода, что приводит к выдаче им неверной информации на ЭБУ.
- Неисправность сервопривода регулятора холостого хода (например, загрязнение актуатора, плохой контакт разъема и так далее).
- Проблемы с электронным блоком управления двигателем.
Как показывает практика, чаще всего автомобилисты сталкиваются либо с проблемами в регуляторе холостого хода, либо в плохом электрическом контакте с ним или на другом участке проводки.
Техническое описание и расшифровка ошибки P0351
Этот диагностический код неисправности (DTC) является общим кодом силового агрегата. Ошибка P0351 считается общим кодом, поскольку применяется ко всем маркам и моделям транспортных средств. Хотя конкретные этапы ремонта могут несколько отличаться в зависимости от модели.
Система зажигания COP (катушка на свече) используется в большинстве современных двигателей. Для каждого цилиндра существует отдельная катушка, управляемая PCM (модулем управления трансмиссией).
Это устраняет необходимость в проводах свечи зажигания, помещая катушку прямо над свечой зажигания. Каждой катушке выделено по два провода. Один из них – питание, обычно идет от центра распределения электроэнергии. Другой провод – это схема драйвера катушки от PCM.
PCM заземляет / отключает эту цепь, чтобы активировать или деактивировать катушку. Цепь драйвера катушки контролируется PCM на предмет неисправностей.
Если в цепи драйвера катушки номер 1 обнаружен обрыв или короткое замыкание, может возникнуть ошибка P0351. Кроме того, в зависимости от автомобиля, PCM может также отключить топливную форсунку цилиндра.
Основные причины возникновения ошибки Р0108
Величина давления во впускном коллекторе зависит от режима работы двигателя. Через впускной коллектор поступает воздух в цилиндры двигателя. Согласно законам физики при прохождении воздуха через впускной коллектор в нем создается разряжение. Разряжение увеличивается (давление уменьшается) при увеличении скорости потока воздуха. Таким образом, при открытии дроссельной заслонки давление уменьшается. При этом показания датчика давления находятся в пределах от 1 до 1,5 Вольт. При закрытии дроссельной заслонки поток воздуха уменьшается, давление во впускном коллекторе увеличивается. Показания датчика «ползут» к значениям 4 – 5 Вольт.
Если показания датчика при открытой дроссельной заслонке больше 3-4 Вольт, система самодиагностики определяет несоответствие и регистрирует ошибку Р0108. Основные причины такой ситуации:
- некорректная работа датчика абсолютного давления;
- неисправность электропроводки к датчику;
- неправильная работа системы управления дроссельной заслонки;
- некорректно установленный угол зажигания, износ ремня ГРМ;
- засорение системы катализатора;
- утечки воздуха в системе впускного коллектора, шлангов соединения МАР-датчика;
- засорение МАР-сенсора;
- неисправность блока управления двигателя.
Для устранения ошибки Р0108 необходимо провести комплекс мероприятий, чтобы выяснить конкретную причину её возникновения.
Проверка утечек топлива FPR
Самый простой способ проверить FPR – использовать датчик давления топлива. Но сначала вы начнете свои тесты с быстрой предварительной проверки:
- Откройте капот и установите регулятор на одном конце топливной рампы. Эта направляющая удерживает топливные форсунки на месте. Стандартный регулятор представляет собой небольшой металлический цилиндр с тонким вакуумным шлангом, соединенным сверху. Кроме того, вы можете увидеть входящий топливопровод и подключенный к нему топливопровод в зависимости от конкретной конфигурации.

Примечание: тенденция на более новых моделях транспортных средств заключается в размещении регулятора давления топлива внутри топливного бака как часть топливного насоса в сборе. Таким образом, вы не найдете его или возвратный топливопровод на этих моделях. Компьютер помогает поддерживать давление вместе с регулятором давления.
- Проверьте вакуумный шланг на герметичность. Поврежденный шланг не позволит регулятору работать должным образом. Также проверьте шланг на наличие повреждений и износ. Затем отсоедините вакуумную линию от регулятора.
- Если вы видите какие-либо признаки топлива в вакуумной магистрали, значит мембрана внутри регулятора имеет утечку, и вам необходимо заменить регулятор. В противном случае продолжите с этим тестом.
Примечание: попробуйте выполнить этот тест сразу после того, как вы поехали на машине по шоссе, что помогает выявить небольшие утечки топлива.
- Проверка регулятора давления топлива
- Найдите клапан Шредера. Большинство современных систем впрыска топлива оснащены шредером или испытательным клапаном, расположенным на топливной рампе. Клапан похож на воздушный клапан на ваших шинах.
- Подсоедините датчик давления топлива к клапану Шредера или испытательному отверстию. Если ваша система не имеет этого клапана или имеет более старую топливную систему, обратитесь к руководству по ремонту для конкретной модели вашего автомобиля, чтобы найти лучший способ подключения датчика к системе.
Примечание: если тестового порта нет или у вас нет подходящего адаптера, снимите клапан тестового порта и подключите датчик напрямую; или отсоедините линию подачи топлива и подсоедините Т-образный переходник. Затем снова подсоедините топливопровод и подсоедините манометр к Т-переходнику.
- Затем найдите спецификацию давления в топливной системе для вашей конкретной модели автомобиля с включенным и выключенным двигателем. Посмотрите этот номер в руководстве по ремонту вашего автомобиля.
- Запустите двигатель и дайте ему поработать на холостом ходу (или попросите помощника запустить двигатель на несколько секунд). Затем выключите двигатель.
- Соблюдайте указатель давления топлива во время работы двигателя и после его выключения. Оно должно соответствовать спецификациям как при работающем двигателе, так и после его выключения.
Примечание. При проведении этого теста также снимите вакуумную линию во время работы двигателя. Это должно привести к повышению давления. В противном случае есть проблема с FPR.
- Запишите показания манометра.
- Сравните ваши показания со спецификацией в вашем руководстве по ремонту.
- Если ваши показания манометра ниже спецификации во время работы двигателя (давление снижается быстро или через несколько минут, или не нарастает), вам необходимо проверить топливный насос (не удается прокачать насос с достаточной скоростью ), топливный фильтр (ограниченный или забитый) или антидренажный клапан (неисправен – слив топлива обратно в топливный бак) на узле топливного насоса.
- Если давление топлива начинает падать вскоре после выключения двигателя, возможно, у вас негерметичная форсунка, негерметичный антидренажный клапан в блоке топливного насоса или проблемы с самой FPR.
- Когда вы обнаруживаете низкое давление и не меняли топливный фильтр более года (или с интервалом, рекомендованным в руководстве по эксплуатации вашего автомобиля), рекомендуется заменить фильтр и повторить проверку снова. Возможно, проблема в засоренном или частично засоренном фильтре. После установки нового топливного фильтра, если давление все еще слишком низкое или система теряет его после выключения двигателя, перейдите к следующему разделу Проверка максимального давления.
- Если ваши показания манометра превышают спецификации, и вы знаете, что вакуумная линия в хорошем состоянии, правильно подключена и не засорена, скорее всего, виноват ваш FPR.
Правила формирования условий возникновения
Для диагностики ошибки Р0108 необходимо выполнение комплекса следующих условий:
- Двигатель должен быть достаточно прогрет. Это официально регламентируется следующим образом: если температура окружающего воздуха ниже -30°С, то минимальное время прогрева должно составлять пять с половиной минут; если же температура окружающего воздуха составляет выше +30°С, то достаточно временного промежутка в 10 секунд. При остальных температурах нужно выбирать нечто среднее.
- Не установлены коды следующих ошибок: P0122, P0123, P0222, P0223 или P0651.
- Двигатель работает на холостых оборотах не менее 10 секунд.
Также существует дополнительное условие, и можно выбрать один из двух следующих вариантов:
- показания датчика положения дроссельной заслонки меньше 15% тогда, когда обороты двигателя менее 2500 об/мин;
- показания датчика положения дроссельной заслонки меньше или равны 35% тогда, когда обороты двигателя более 2500 об/мин.
При соблюдении перечисленных выше условий электронный блок управления двигателем принимает решение об обнаружении ошибка P0108 в случае, если в течение более 5 последних секунд напряжение датчика абсолютного давления превышает значение, равное 4,8 В
Обратите внимание, что данный алгоритм не является абсолютным, то есть, на некоторых марках автомобилей отдельные значения могут меняться, хоть и незначительно

Схема подключения датчика абсолютного давления.
Что делать, если возникла ошибка P0130
Как можно понять из описания проблемы, факторов, которые приводят к ошибке P0130, не так много. Соответственно, водитель или мастер могут избавиться от неисправности, выполнив следующий алгоритм действий, чтобы определить причину проблемы и устранить ее:
-
Первым делом нужно проверить провода, которые питают первый лямбда зонд (установленный до катализатора);
- Если питание по проводам поступает, внимательно осмотрите на наличие коррозии, повреждений, нагара, загрязнения и других дефектов разъем датчика кислорода;
- Далее рекомендуется проверить напряжение между сигнальным проводом лямбда зонда и массой. Для этого нужно подключить к ним щупы вольтметра. Если датчик кислорода исправен, его напряжение будет находиться на уровне около 0,45 Вольт (если вольтметр показывает другое число, рекомендуется уточнить значение напряжения для конкретной модели автомобиля, поскольку оно может отличаться);
- Также рекомендуется при помощи омметра проверить сопротивление нагревателя датчика кислорода (два белых провода). Показатель сопротивления будет варьироваться от 2 до 10 Ом, в зависимости от модели автомобиля. Точное значение можно узнать из документации к датчику;
- Если проблема не связана с проводкой и датчиком кислорода, нужно проверить датчик массового расхода воздуха и герметичность выпускного коллектора, возможно требуется заменить прокладки. Обязательно диагностируйте наличие подсоса в цепи после расходомера.
В зависимости от того, какая проблема была установлена в ходе диагностики, необходимо провести соответствующие ремонтные работы:
При проблемах с проводкой: найти место обрыва и устранить неисправность;
При трещине в выпускном коллекторе: выполнить необходимые работы для создания герметичности (сварка или замена неисправного элемента);
При поломке датчика: заменить датчик
Здесь важно отметить, что не стоит экономить на датчике кислорода и приобретать дешевый китайский аналог оригинального лямбда зонда, поскольку часто с ними возникают проблемы. Также не рекомендуется устанавливать так называемую «обманку» и прошивать ЭБУ
Она может избавить от ошибки P0130, но позже возникнут другие неисправности.
Выполнив необходимые действия для устранения ошибки P0130, следует дать некоторое время поработать мотору в различных режимах (особенно в тех, в которых загоралась индикация Check Engine) и сбросить ошибку.
Чаще всего ошибка P0130 диагностируется на автомобилях Opel, Kia, Hyundai, Subaru и Ford.
(435 голос., средний: 4,55 из 5)
Основные причины возникновения ошибки р0100
Причин возникновения ошибки с кодом P0100 на самом деле несколько. Среди них:
Датчик массового расхода воздуха.
Окисление контактов на разъеме датчика массового расхода воздуха (сокращенно ДМРВ). Это может произойти просто по естественным причинам, когда контакты находятся в неподвижном состоянии долгое время, а на них постоянно действует находящаяся в атмосфере влага. Также окись может появиться в результате попадания на контакты большого количества воды или агрессивной жидкости (например, электролита или чего-то подобного). В некоторых случаях имеет место неполадки в пайке контактов (например, их разбитие, такое нередко встречается на автомобилях Nissan Maxima, Frontier, Sentra, Pathfinder и некоторых других).
Разрушение изоляции проводки. Это также естественный процесс, особенно для старого автомобиля. Материал, из которого изготовлена изоляция на проводах, со временем пересыхает и начинает разрушаться. Вследствие этого значение электрической изоляции снижается, вплоть до ноля, то есть, появления в цепи короткого замыкания. Как следствие, в электронный блок управления двигателем (ЭБУ или ECM на английском языке) поступает некорректная информация, и последний выдает сигнал об ошибке.
Обрыв проводки датчика. Это может произойти с одним или несколькими сигнальными проводами. По естественным причинам такая ситуация не возникает. Скорее она возможна в случае, если в процессе каких-либо ремонтных работ мастер автосервиса или непосредственно автовладелец механически повредил проводку, разорвав указанные провода.Это естественно приведет к тому, что на ЭБУ информация от датчика перестанет поступать или будут поступать некорректные данные.
Не полностью одетый разъем (фишка). Из-за этого нет нормального контакта между отдельными проводами. Такая ситуация может возникнуть вследствие регулярной тряски автомобиля при езде по неровным дорогам или в случае, если разъем разъединяли до этого принудительно, а обратно он был установлен не должным образом.
Дефект или поломка непосредственно датчика массового расхода воздуха. Это устройство достаточно простое по своей конструкции, однако в некоторых случаях датчик может быть поврежден, в том числе идти с браком с завода-изготовителя. Однако чаще всего он повреждается при различных ремонтных работах. Так, на многих автомобилях датчик массового расхода воздуха установлен в непосредственной близости от воздушного фильтра, который необходимо регулярно менять
И вот как раз при смене фильтра зачастую автовладельцы (а изредка и работники автосервисов) по неосторожности или незнанию могут повредить контакты на датчике, тем самым приводя его в полную или частичную негодность. Загрязнение датчика
При попадании значительного количества мусора и/или пыли на рабочую поверхность (электрическую спираль) датчика может возникнуть ситуация, когда датчик будет выдавать некорректную информацию. Загрязнение может произойти по естественным причинам, поскольку ДМРВ загрязняется от пыли и грязи, находящейся в приточном воздухе. Ситуация может усугубиться, если автомобиль ехал по пыльной и/или грязной дороге длительное время (или используется в таких условиях на постоянной основе).
Короткое замыкание в датчике. По сути это та же поломка датчика, вызванная коротким замыкания внутри его цепи (на электрической спирали). Замыкание может возникнуть из-за попавшего внутрь корпуса мусора (который закоротит схему), или повреждения изоляции на проводке (на тех элементах, где она есть). В некоторых случаях причиной короткого замыкания может быть механическое повреждение датчика, которое приводит к смещению его электрических контактов.
Ограниченный поток воздуха. Такая ситуация возможна, если воздуховод сильно забит мусором. Это опасно в первую очередь для двигателя, поскольку он работает в условиях “кислородного голодания”. Нельзя допускать чрезмерного засорения воздуховодов и нужно обязательно вовремя менять воздушный фильтр.
Проблемы с ЭБУ. Возможно, проблема вовсе не с датчиком, а непосредственно с электронным блоком управления двигателем. Такое явление происходит редко, и обычно сопровождается большим количеством проблем и ошибок, среди которых ошибка с кодом P0100 будет лишь одной из многих.
Датчик массового расхода воздуха — устройство достаточно простое и надежное, однако если не поддерживать в чистоте воздуховоды и не менять вовремя воздушный фильтр, то существует высокая вероятность его выхода из строя.
Как устранять ошибку P0562?
Чтобы отследить проблему с ошибкой P0562, наиболее полезным инструментом является цифровой мультиметр.
Визуальный осмотр
Простой визуальный осмотр — лучший способ для начала поиска неисправностей. При выключенном двигателе осмотрите под капотом признаки неисправности генератора, ослабленных соединений и ремня со слабым натяжением.
Код ошибки P0036 – неисправность цепи управления нагревателем датчика кислорода (Банк 1 Датчик 2)
Понажимайте на ремень привода генератора, чтобы проверить его достаточное натяжение. Проверьте наличие признаков блокировки генератора. Замените растянутый ремень или ослабленный натяжитель, прежде чем продолжить дальнейшую диагностику.
Покачайте клеммы на аккумуляторе — проверьте, что они хорошо затянуты и неподвижны от руки. Следите за коррозией на клеммах аккумулятора, трещинами или износом на кабелях.
Проверка системы зарядки
При работающем двигателе и отключении всех потребителей измерьте напряжение на клеммах аккумулятора с помощью мультиметра. Показания должны быть от 12,6 до 15,0 вольт.
Если напряжение ниже 12,6 В, аккумулятор не получает заряд от генератора. Это условие обычно связано с неисправным генератором и будет сопровождаться тяжелым запуском, тусклым светом. Стеклоочистители и стеклоподъемники будут работать медленнее или не работать вообще.
Если показания напряжения находятся в пределах нормального диапазона, у вас могут быть проблемы с проводкой.
Проверка электропроводки
Убедитесь, что все соединения на генераторе правильно установлены и затянуты. Проверьте, нет ли ослабленных контактов, трещин в изоляции проводов,следов коррозии или воды в разъёмах. Убедитесь, что фиксаторы на всех разъёмах генератора полностью вставлены.
При работающем двигателе внимательно проследите проводку от генератора к блоку управления, следя за ремнём, шкивами и другими движущимися частями.
Шевелите каждый провод, следя за изменениями напряжения при этом. Если во время проведения теста в определенной области напряжение значительно падает или резко возрастает, устраните обрыв и повторите проверку.
Проверьте соединение на ЭБУ. Убедитесь, что на соответствующих контактах нет коррозии или влаги, затем убедитесь, что разъем полностью вставлен в модуль.
Ошибка P0171 — что значит, симптомы, причины, диагностика, устранение
Тест аккумулятора

При выключенном двигателе проверьте напряжение на аккумуляторе. Оно должно составлять от 12,0 до 12,6 В и не снижаться. Значительное снижение напряжения указывает либо на неисправность батареи, либо на большие паразитные токи. Оба причины могут привести к установке кода неисправности P0562.
Вы также можете проверить правильность напряжения на генераторе. Измерьте напряжение между положительной клеммой генератора и массой.

Напряжение должно соответствовать напряжению на аккумуляторе. Если это не так, плюс на генераторе нужно восстановить.
Контроль за исправностью системы управления фазами
Но с учетом того, что такая система ощутимо меняет характеристики двигателя, ЭБУ впрыска должен контролировать за тем, как исполняется его команда на перемещение распредвала. Для этого используется датчик, установленный на управляемом валу: если на «не-VTI» моторах он нужен только для правильного фазирования впрыска и зажигания, то на моторах с управляемыми фазами он может и отслеживать изменение положения вала.
ЭБУ впрыска получает информацию о положении коленчатого вала с высокой точностью благодаря многозубому венцу на маховике или шкиве. В калибровках контроллера задан момент, когда на каждом режиме приходит сигнал с датчика распредвала относительно начального импульса с датчика положения коленчатого вала. Так ЭБУ впрыска узнает что распредвал «на месте» и что тот действительно сдвинулся после срабатывания клапана управления газораспределением.
Ошибка P, а заслонка и датчики в норме — Ford Focus Клуб

Какие признаки работы машины говорят о том, что имеется как раз эта неисправность? Неполадки в функционировании двигателя появляется постепенно.
При достижении рабочей температуры, автомобиль начинает ехать очень слабо, при этом можно наблюдать характерные рывки. Ошибка р свидетельствует о том, ошибка p2008 ford клапан изменения длины впускного коллектора работает некорректно.
Способ исправления поломки Самым правильным решением при возникновении ошибки р на Форд Фокус второго поколения будет замена соответствующего клапана.
Однако оригинальная деталь стоит довольно дорого. Можно ли как-то сэкономить и найти альтернативу?
Ford Focus Клуб
Цена в районе рублей в зависимости от жадности магазина. Далее все совсем не сложно.

Если есть минимальные знания как правильно скручиваются провода, если нет — лучше попросить знакомых как например попросили. При высоких оборотах двигателя клапан перекрывается, уменьшая рабочую длину впускного коллектора, для ошибка p2008 ford наполнения цилиндров и увеличения мощности двигателя.

Управляют этим клапаном два соленоида, которые расположены слева от двигателя. К ним подходят четыре трубки по две на соленоид.
Ошибка Р на Форд Фокус 2: Обслуживание и ремонт Проблемы в сервисном меню на старых автомобилях — это обычное. Некоторые коды сигнализируют ошибка p2008 ford необходимости проведения тестов управления силовым агрегатом, другие, указывают на серьёзные проблемы.
Р ошибка Форд Фокус 2 — это одна из хронических болезней машин прежних ошибка p2008 ford, оснащённых бензиновым мотором 1,8 литра. В статье мы выясним, что за ошибка Р, каковы её признаки. Хуже, когда симптомы болезни скрытые. На деле же оказалось что это не особенность, а типичная поломка.
Она хорошо расписана на ффклабе, главное только до нее добраться. По большому счету на форуме до нее дошел, но указанные проверки тогда мои имрц клапана прошли отлично — плавающая поломка, то есть контакт, то ошибка p2008 ford.
Ошибка p2008 Ford
Еще вчера клапан прозванивался и запускался, а сегодня уже бесконечность и никакой раекции ошибка p2008 ford скидывание трубки. На малых оборотах двигатель явно тупил, и звук был будто двигатель заливается бензином, так что решил добить проблему пока выходные.
Показания мультиметра при неисправном клапене Номинальное значение сопротивления для вакуумного клапана — от 30 до 40 Ом, ошибка p2008 ford отклонение в сторону увеличения сопротивления — максимум Ом.
Для замера нужно всего-навсего снять клеммную колодку, нажав на фиксатор, и установить щупы тестера на контакты клапана. Неисправный клапан подлежит замене, хотя его можно отремонтировать теоретически.
В каких частях искать проблемы
На этот вопрос почти невозможно найти точного ответа. Каждый случай индивидуален. Необходимо для каждого узла провести диагностику. Это касается:
- ТНВД.
- Датчика давления в топливной системе.
- Разъёмов, к которым идут жгуты электричества.
- Форсуночной части для топлива.
- Клапана у регулятора давления.
- Магистрали, у которой давление высокое.
- Магистрали, где уровень давления низкий.
Топливный насос в баке должен стать первым элементом, который подвергается проверке.
Часто ошибки возникают из-за того, что в разъёме топливной станции существует контакт низкого качества. Ещё одна возможная причина – плохая проходимость топлива в магистрали. Из-за этого тоже появляется ошибка р0087.
По каким причинам возникает ошибка p0087 всего
- Износился толкатель, который стоит в ТНВД.
- Плохо работает топливная форсунка, из-за чего высокий уровень давления не поддерживается.
- Клапан регулировки давления топлива перестал работать.
- Датчик давления топлива вышел из строя.
Велика вероятность того, что требуется замена фильтра. Или перестала быть стабильной работа насоса, который находится внутри топливного бака. Часто случается так, что просто пропадают контакты в разъёме. Потому проверку начинают с использования манометра. Чтобы понять, каково магистральное давление. При этом двигателю задают различные режимы. Это позволит понять, как проверить давление в топливной системе.
Если же давление постоянно меняет свой уровень, то стоит искать причину в регуляторе давления, внутри топливной рамки.
Способ проверки давления в топливной системе вы найдете в этом видео:
Вывод
В заключении стоит отметить, что ошибка Р0108 не является критичной, поэтому движение на автомобили можно продолжать. Однако при первой возможности все же лучше избавиться от нее, то есть, выполнить ревизию проводки датчика абсолютного давления, а также непосредственно этого узла. Как правило, проблемы кроются именно в проводке, и лишь в редких случаях виноват сам датчик (вышел из строя). Также после устранения механических неполадок удалить информацию об ошибки из памяти электронного блока управления двигателем. Как это можно сделать — указано выше. Периодическое выполнение ревизии проводов не только датчика высокого давления, но и других узлов позволит предотвратить появление как ошибки P0108, так и других подобных проблем.

Ошибка P1505 говорит от том, что низкий уровень сигнала на обмотке № 1 регулятора холостого хода. То есть возникает неправильное положение заслонки из-за неисправности регулятора холостого хода (РХХ). Причинами ее появления может быть поломка регулятора холостого хода (неисправен сервопривод регулятора или трещина в корпусе), забитый топливный фильтр и еще несколько.
Если объяснять в двух словах почему возникла неисправность «датчика» холостого хода и возникла ошибка с кодом P1505, то можно сказать так: «Одна из катушек актуатора холостого хода дурит, что может быть связано как самой катушкой или загрязнением непосредственноактуатора, так и плохим контактом разъема».
Заметьте, что ошибку Р1505 просто так нельзя стереть из памяти ЭБУ, то есть не устранив неисправность. РХХ состоит из двух катушек: обмотка №1 — работает на открывание клапана; обмотка №2 — отвечает за закрытие заслонки. Поэтому если произошел сбой в работе регулятора ХХ, то может возникнуть один из двух диагностических кодов:
- P1505 — сигнал низкого уровня в цепи сервопривода регулятора оборотов холостого хода обмотка 1.
- P1507 — сигнал низкого уровня в цепи сервопривода регулятора оборотов холостого хода обмотка 2.
Поскольку чаще всего автовладельцы сталкиваются именно с первой проблемой, рассмотрим более подробней когда возникает ошибка холостого хода с кодом 1505, а также подскажем где нужно искать причину и как ее устранять.
Классический ПИД-регулятор
Простейшая система автоматического регулирования с обратной связью показана на рисунке. В ней блок R называют регулятором (от слова Regulator), P — объектом регулирования (от слова Process), r — управляющим воздействием или уставкой (reference), e — сигналом рассогласования или ошибки (error), u — выходной величиной регулятора, y — регулируемой величиной.

Частный случай ПИД-регулятора — пропорциональный или П-регулятор: u(t)=K·e(t). С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает относительно медленные переходные процессы и ненулевую статическую ошибку (статическая ошибка e0 — постоянная ошибка в установившемся режиме системы; см. рис. ниже).

С увеличением пропорционального коэффициента K статическая ошибка e0 уменьшается, время нарастания переходного процесса tн уменьшается, перерегулирование σ увеличивается.
Чтобы убрать статическую ошибку в установившемся режиме, в регулятор вводят интегральный канал с коэффициентом усиления Ki, так что:

Такой регулятор называется пропорционально-интегральным или ПИ-регулятором. Интегратор выдает сигнал, пропорциональный накопленной ошибке, поэтому переходный процесс несколько замедляется.

Однако за счет интегрального канала обеспечивается нулевая ошибка e0 в установившемся состоянии при ступенчатом возмущении и ступенчатом изменении задающего сигнала-уставки.

С увеличением коэффициента интегральной составляющей ПИ-регулятора Ki время нарастания переходного процесса tн уменьшается, перерегулирование σ увеличивается, время регулирования tр увеличивается.
Для ускорения переходных процессов добавляют дифференциальный канал с коэффициентом усиления Kd:
|
|
(1.01) |

Распространена также другая модификация выражения (1.01):
|
|
(1.02) |

где t — время; K — пропорциональный коэффициент (безразмерный), Ti — постоянная интегрирования (размерность времени) и Td — постоянная дифференцирования (размерность времени) регулятора. Такой регулятор называют ПИД-регулятором.
Регуляторы этого типа очень хорошо зарекомендовали себя в практических задачах. Кроме того, иногда используются ПД-регуляторы (пропорционально-дифференциальные), у которых нет интегрального канала.
Управление по производной – это быстрый способ управления. Сигнал дифференциального канала наиболее важен при изменениях входов и исчезает в установившемся режиме. Он позволяет реагировать не на само увеличение ошибки, а на тенденцию ее изменения, и принять превентивные меры
. Главный недостаток дифференциального канала – большое влияние высокочастотных помех, например, шумов измерений.

С увеличением коэффициента дифференциальной составляющей ПИД-регулятора Kd перерегулирование σ уменьшается, время регулирования tр уменьшается.
|
При увеличении коэффициентов |
|||
|
Kp |
Ki |
Kd |
|
|
Время нарастания tн |
|
|
|
|
Пере- регулирование σ |
|
|
|
|
Время регулирования tр |
|
|
|
|
Статическая ошибка e0 |
|
|
|
|
|




Для устойчивого объекта можно выбрать коэффициенты регулятора опытным путем, выполняя эксперименты с реальным объектом. Предложено несколько методов решения этой задачи, например, правила Зиглера-Никольса (Ziegler J. G. — Nichols N. B.), Коэна-Куна (Cohen O.H. – Coon O.A.) или CHR (Chien K. L. — Hrones J. A. — Reswick J. B.).
Список используемой литературы
- Поляков К.Ю.,
Теория автоматического управления для
чайников
, Санкт-Петербург, 2008 г. - Востриков А.С., Французова Г.А.,
Теория автоматического регулирования
. 2003 г. - Глушков В.М., Амосов Н.М., Артеменко И.А. Энциклопедия кибернетики. Том 2. Киев, 1974 г.
- Теория автоматического управления: Учеб. для вузов по спец.
Автоматика и телемеханика
. В 2-х ч. Ч. I. Теория линейных систем автоматического управления / Н. А. Бабаков, А. А. Воронов, А. А. Воронова и др.; Под ред. А. А. Воронова.—2-е изд., перераб. и доп. — М.: Высш. шк., 1986. — 367 с. - Денисенко В.В.,
Энциклопедия АСУ ТП
, bookasutp.ru - Dew Toochinda,
Scilab Ninja. Control Engineering with Scilab
,Scilab Control Engineering Basics
, scilab.ninja/study-modules/scilab-control-engineering-basics/
У нас на сайте Вы можете приобрести качественные частотные преобразователи. Подробности тут