
From Wikipedia, the free encyclopedia
In digital transmission, the number of bit errors is the numbers of received bits of a data stream over a communication channel that have been altered due to noise, interference, distortion or bit synchronization errors.
The bit error rate (BER) is the number of bit errors per unit time. The bit error ratio (also BER) is the number of bit errors divided by the total number of transferred bits during a studied time interval. Bit error ratio is a unitless performance measure, often expressed as a percentage.[1]
The bit error probability pe is the expected value of the bit error ratio. The bit error ratio can be considered as an approximate estimate of the bit error probability. This estimate is accurate for a long time interval and a high number of bit errors.
Example[edit]
As an example, assume this transmitted bit sequence:
1 1 0 0 0 1 0 1 1
and the following received bit sequence:
0 1 0 1 0 1 0 0 1,
The number of bit errors (the underlined bits) is, in this case, 3. The BER is 3 incorrect bits divided by 9 transferred bits, resulting in a BER of 0.333 or 33.3%.
Packet error ratio[edit]
The packet error ratio (PER) is the number of incorrectly received data packets divided by the total number of received packets. A packet is declared incorrect if at least one bit is erroneous. The expectation value of the PER is denoted packet error probability pp, which for a data packet length of N bits can be expressed as
 ,
,

assuming that the bit errors are independent of each other. For small bit error probabilities and large data packets, this is approximately

Similar measurements can be carried out for the transmission of frames, blocks, or symbols.
The above expression can be rearranged to express the corresponding BER (pe) as a function of the PER (pp) and the data packet length N in bits:
![{displaystyle p_{e}=1-{sqrt[{N}]{(1-p_{p})}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f5d380e45b0451c45265e199221fae5bd5b84bf9)
Factors affecting the BER[edit]
In a communication system, the receiver side BER may be affected by transmission channel noise, interference, distortion, bit synchronization problems, attenuation, wireless multipath fading, etc.
The BER may be improved by choosing a strong signal strength (unless this causes cross-talk and more bit errors), by choosing a slow and robust modulation scheme or line coding scheme, and by applying channel coding schemes such as redundant forward error correction codes.
The transmission BER is the number of detected bits that are incorrect before error correction, divided by the total number of transferred bits (including redundant error codes). The information BER, approximately equal to the decoding error probability, is the number of decoded bits that remain incorrect after the error correction, divided by the total number of decoded bits (the useful information). Normally the transmission BER is larger than the information BER. The information BER is affected by the strength of the forward error correction code.
Analysis of the BER[edit]
The BER may be evaluated using stochastic (Monte Carlo) computer simulations. If a simple transmission channel model and data source model is assumed, the BER may also be calculated analytically. An example of such a data source model is the Bernoulli source.
Examples of simple channel models used in information theory are:
- Binary symmetric channel (used in analysis of decoding error probability in case of non-bursty bit errors on the transmission channel)
- Additive white Gaussian noise (AWGN) channel without fading.
A worst-case scenario is a completely random channel, where noise totally dominates over the useful signal. This results in a transmission BER of 50% (provided that a Bernoulli binary data source and a binary symmetrical channel are assumed, see below).
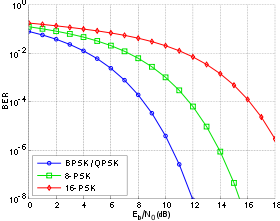
Bit-error rate curves for BPSK, QPSK, 8-PSK and 16-PSK, AWGN channel.

In a noisy channel, the BER is often expressed as a function of the normalized carrier-to-noise ratio measure denoted Eb/N0, (energy per bit to noise power spectral density ratio), or Es/N0 (energy per modulation symbol to noise spectral density).
For example, in the case of QPSK modulation and AWGN channel, the BER as function of the Eb/N0 is given by:
 .[2]
.[2]
People usually plot the BER curves to describe the performance of a digital communication system. In optical communication, BER(dB) vs. Received Power(dBm) is usually used; while in wireless communication, BER(dB) vs. SNR(dB) is used.
Measuring the bit error ratio helps people choose the appropriate forward error correction codes. Since most such codes correct only bit-flips, but not bit-insertions or bit-deletions, the Hamming distance metric is the appropriate way to measure the number of bit errors. Many FEC coders also continuously measure the current BER.
A more general way of measuring the number of bit errors is the Levenshtein distance.
The Levenshtein distance measurement is more appropriate for measuring raw channel performance before frame synchronization, and when using error correction codes designed to correct bit-insertions and bit-deletions, such as Marker Codes and Watermark Codes.[3]
Mathematical draft[edit]
The BER is the likelihood of a bit misinterpretation due to electrical noise  . Considering a bipolar NRZ transmission, we have
. Considering a bipolar NRZ transmission, we have
 for a «1» and
for a «1» and  for a «0». Each of
for a «0». Each of  and
and  has a period of
has a period of  .
.
Knowing that the noise has a bilateral spectral density  ,
,
is 
and is  .
.
Returning to BER, we have the likelihood of a bit misinterpretation  .
.
 and
and 
where  is the threshold of decision, set to 0 when
is the threshold of decision, set to 0 when  .
.
We can use the average energy of the signal  to find the final expression :
to find the final expression :

±§
Bit error rate test[edit]
BERT or bit error rate test is a testing method for digital communication circuits that uses predetermined stress patterns consisting of a sequence of logical ones and zeros generated by a test pattern generator.
A BERT typically consists of a test pattern generator and a receiver that can be set to the same pattern. They can be used in pairs, with one at either end of a transmission link, or singularly at one end with a loopback at the remote end. BERTs are typically stand-alone specialised instruments, but can be personal computer–based. In use, the number of errors, if any, are counted and presented as a ratio such as 1 in 1,000,000, or 1 in 1e06.
Common types of BERT stress patterns[edit]
- PRBS (pseudorandom binary sequence) – A pseudorandom binary sequencer of N Bits. These pattern sequences are used to measure jitter and eye mask of TX-Data in electrical and optical data links.
- QRSS (quasi random signal source) – A pseudorandom binary sequencer which generates every combination of a 20-bit word, repeats every 1,048,575 words, and suppresses consecutive zeros to no more than 14. It contains high-density sequences, low-density sequences, and sequences that change from low to high and vice versa. This pattern is also the standard pattern used to measure jitter.
- 3 in 24 – Pattern contains the longest string of consecutive zeros (15) with the lowest ones density (12.5%). This pattern simultaneously stresses minimum ones density and the maximum number of consecutive zeros. The D4 frame format of 3 in 24 may cause a D4 yellow alarm for frame circuits depending on the alignment of one bits to a frame.
- 1:7 – Also referred to as 1 in 8. It has only a single one in an eight-bit repeating sequence. This pattern stresses the minimum ones density of 12.5% and should be used when testing facilities set for B8ZS coding as the 3 in 24 pattern increases to 29.5% when converted to B8ZS.
- Min/max – Pattern rapid sequence changes from low density to high density. Most useful when stressing the repeater’s ALBO feature.
- All ones (or mark) – A pattern composed of ones only. This pattern causes the repeater to consume the maximum amount of power. If DC to the repeater is regulated properly, the repeater will have no trouble transmitting the long ones sequence. This pattern should be used when measuring span power regulation. An unframed all ones pattern is used to indicate an AIS (also known as a blue alarm).
- All zeros – A pattern composed of zeros only. It is effective in finding equipment misoptioned for AMI, such as fiber/radio multiplex low-speed inputs.
- Alternating 0s and 1s — A pattern composed of alternating ones and zeroes.
- 2 in 8 – Pattern contains a maximum of four consecutive zeros. It will not invoke a B8ZS sequence because eight consecutive zeros are required to cause a B8ZS substitution. The pattern is effective in finding equipment misoptioned for B8ZS.
- Bridgetap — Bridge taps within a span can be detected by employing a number of test patterns with a variety of ones and zeros densities. This test generates 21 test patterns and runs for 15 minutes. If a signal error occurs, the span may have one or more bridge taps. This pattern is only effective for T1 spans that transmit the signal raw. Modulation used in HDSL spans negates the bridgetap patterns’ ability to uncover bridge taps.
- Multipat — This test generates five commonly used test patterns to allow DS1 span testing without having to select each test pattern individually. Patterns are: all ones, 1:7, 2 in 8, 3 in 24, and QRSS.
- T1-DALY and 55 OCTET — Each of these patterns contain fifty-five (55), eight bit octets of data in a sequence that changes rapidly between low and high density. These patterns are used primarily to stress the ALBO and equalizer circuitry but they will also stress timing recovery. 55 OCTET has fifteen (15) consecutive zeroes and can only be used unframed without violating one’s density requirements. For framed signals, the T1-DALY pattern should be used. Both patterns will force a B8ZS code in circuits optioned for B8ZS.
Bit error rate tester[edit]
A bit error rate tester (BERT), also known as a «bit error ratio tester»[4] or bit error rate test solution (BERTs) is electronic test equipment used to test the quality of signal transmission of single components or complete systems.
The main building blocks of a BERT are:
- Pattern generator, which transmits a defined test pattern to the DUT or test system
- Error detector connected to the DUT or test system, to count the errors generated by the DUT or test system
- Clock signal generator to synchronize the pattern generator and the error detector
- Digital communication analyser is optional to display the transmitted or received signal
- Electrical-optical converter and optical-electrical converter for testing optical communication signals
See also[edit]
- Burst error
- Error correction code
- Errored second
- Pseudo bit error ratio
- Viterbi Error Rate
References[edit]
- ^ Jit Lim (14 December 2010). «Is BER the bit error ratio or the bit error rate?». EDN. Retrieved 2015-02-16.
- ^
Digital Communications, John Proakis, Massoud Salehi, McGraw-Hill Education, Nov 6, 2007 - ^
«Keyboards and Covert Channels»
by Gaurav Shah, Andres Molina, and Matt Blaze (2006?) - ^ «Bit Error Rate Testing: BER Test BERT » Electronics Notes». www.electronics-notes.com. Retrieved 2020-04-11.
![]() This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
External links[edit]
- QPSK BER for AWGN channel – online experiment
Рассмотрим и проанализируем существующие методы оценки качества сигнала.
ГЛАЗ-ДИАГРАММА
Удобным (и гениально простым!) графическим методом оценки качества цифрового сигнала на выходе регенератора является глаз-диаграмма. Она представляет собой результат наложения всех возможных импульсных последовательностей в течение промежутка времени, равного двум тактовым интервалам линейного сигнала.
Наиболее простой пример — диаграмма для троичного (возможные уровни -1, 0, +1) линейного сигнала при косинус-квадратной форме входного сигнала регенератора. Хорошо видна область («раскрыв») глаз-диаграммы, в пределах которой должна производиться операция опознания сигнала для каждого из двух уровней решения. Горизонтальные линии, обозначенные как -1, 0 и +1, соответствуют амплитудам импульсов при отсутствии помех, а вертикальные линии через каждый тактовый интервал Т — идеальным моментам решения.
Процесс принятия решения показан в виде двух крестиков в каждом «раскрыве» глаз-диаграммы. Вертикальная черта каждого крестика определяет момент решения, а горизонтальная — его уровень. Гарантией безошибочной регенерации цифрового сигнала является наличие вблизи каждого крестика определенной области, в пределах которой и должно происходить опознание сигнала.
Наличие помех приводит к сокращению этой области по сравнению с идеальным случаем. Минимальное расстояние между центром крестиков и краями «глаза» служит мерой запаса помехозащищенности. Запас уменьшается как из-за искажений формы импульса, так и вследствие несовершенства самого процесса принятия решения. Первая причина приводит к уменьшению «раскрыва» глаз-диаграммы, а вторая — к перемещению точки принятия решения вдоль границ глаза. Возникающие вследствие двух указанных причин искажения принято подразделять на амплитудные и временные, соответствующие смещению точки принятия решения по вертикали и горизонтали. Для удобства дальнейших рассуждений будем считать, что точка принятия решения остается неподвижной, а уменьшается «раскрыв».
Степень уменьшения «раскрыва» глаз-диаграммы по вертикали определяется результирующими искажениями, вызванными межсимвольными помехами, эхосигналами, изменениями амплитуды импульсов на выходе регенератора, погрешностями порогов решающих устройств. В результате воздействий появляется вертикальная составляющая искажений глаз-диаграммы ΔA. Именно на эту величину должны быть сдвинуты края идеальной глаз-диаграммы.
Временные искажения глаз-диаграммы ΔТ, включающие несоответствие моментов решения их статическим значениям и джиттер, учитываются обычно в смещении границ «глаза» по горизонтали.
Очевидно, что для компенсации ухудшения реальной глаз-диаграммы по сравнению с идеальной необходимо увеличить величину отношения сигнал/шум на величину ΔS/N = 20 lg (H/h), дБ, где H и h представляют собой вертикальный «раскрыв» идеальной и реальной глаз-диаграмм, соответственно.
КОЭФФИЦИЕНТ БИТОВЫХ ОШИБОК
Ключевым параметром качества ЦСП являются ошибки. Показателей ошибок множество, все они будут по-очередно рассмотрены ниже. Самый простой из них — коэффициент битовых ошибок (Bit Error Ratio, BER) или джиттер, так актуальный для VoIP телефонов или VoIP шлюзов. Напомним, что под BER следует понимать отношение количества ошибочных битов к их общему переданному числу.
Необходимо отметить, что при прочих равных условиях BER зависит от количества переданных битов. Например, длинная последовательность одинаковых символов может вызвать низкочастотную амплитудную модуляцию и детерминированный джиттер, следствием которых будет рост числа ошибок. Для обеспечения корректности сравнения разных ЦСП используются типовые испытательные последовательности, причем каждой стандартной скорости передачи соответствует своя испытательная последовательность. По своим свойствам они близки к гауссову шуму, но имеют определенный период повторения. Поэтому они называются не просто случайными, а псевдослучайными последовательностями (ПСП) (Pseudo-Random Bit Sequence, PRBS).
Следует особо подчеркнуть, что оценка BER будет абсолютно точной только при бесконечно большом числе переданных битов. Строго говоря, когда их число ограничено, мы получаем не вероятность события BER, а его оценку BERT. Очевидно, что уровень достоверности этой оценки (Confidential Level, CL), называемый также доверительной вероятностью, зависит от количества зарегистрированных ошибок и от общего числа переданных битов N.
Это подтверждают данные таблицы (см. Таблицу 1), где приведены требуемые значения нормированной длительности NxBER в зависимости от числа зарегистрированных ошибок Е и уровня достоверности оценки CL — чем больше число зарегистрированных ошибок и уровень достоверности оценки CL, тем большее число битов необходимо передать.
Типовая схема измерения BER предполагает наличие генератора испытательных битовых (символьных) последовательностей тестера BER, испытуемого объекта (регенератора, участка ЦСП и т. д.) и детектора ошибок тестера BER.
Генератор тестера BER формирует испытательные сигналы, которые подаются на вход тестируемого объекта. Генератор тестируемого сигнала является также источником сигнала для детектора ошибок тестера BER.
Тестируемый объект может быть территориально совмещен с тестером BER или находиться в удаленном пункте. В любом случае испытуемый объект должен быть выведен из эксплуатации и сигнал с его выхода подан на вход приемника тестера BER. Как говорят связисты, должен быть организован измерительный шлейф.
Детектор ошибок получает испытательный сигнал с выхода тестируемого объекта или формирует точную копию этого сигнала автономно. Испытательный сигнал генератора сравнивается побитно с сигналом, поступающим с выхода испытуемого объекта. Каждое различие сигналов детектор фиксирует как битовую ошибку.
Необходимую синфазность двух указанных сигналов обеспечивает детектор ошибок, в котором предусмотрена требуемая задержка сигнала с выхода генератора. Задача фазирования сигналов обычно выполняется на этапе калибровки тестера BER.
Испытательные сигналы тестеров BER стандартизованы. Как уже отмечалось выше, информационный сигнал в тестерах BER имитируется в виде так называемых псевдослучайных последовательностей ПСП (PRBS), они формируются в соответствии со стандартными алгоритмами и различаются числом генерируемых символов M = 2k–1 , где k — целое число.
В генераторах тестеров BER предусмотрена возможность создания произвольных испытательных последовательностей, называемых обычно кодовыми словами.
Очевидным недостатком BER является необходимость вывода тестируемого объекта из эксплуатации (Out of Service, OoS), что вполне приемлемо в процессе разработки или ремонта объекта и неудобно, если ЦСП уже эксплуатируется. Кроме того, параметр BER хорош для оценки влияния одиночных помех, обусловленных гауссовыми процессами, например собственными и переходными помехами. В то же время в любой реальной системе связи присутствуют и целые пакеты таких ошибок (их еще называют серийными ошибками). Поэтому без знания временной структуры ошибок системы связи невозможна эффективная локализация повреждений и накопление адекватной информации о качестве разработки и инсталляции оборудования. По сути, одного параметра BER недостаточно для корректной оценки работы ЦСП. Необходимы более адекватные, учитывающие структуру помех, показатели качества ЦСП с возможностью их мониторинга в процессе нормальной эксплуатации системы связи (In Service Monitoring, ISM). Такие как рекомендации G.821 и G.826.
�
Таблица 1. Требуемые значения нормированной длительности.
| E | CL = 90% | CL = 95% | CL = 99% |
| NxBER | |||
| 0 | 2,3 | 3 | 4,61 |
| 1 | 3,89 | 4,74 | 6,64 |
| 2 | 5,32 | 6,3 | 8,4 |
4.7.1. Вероятность появления ошибочного бита при когерентном обнаружении сигнала BPSK
4.7.2. Вероятность появления ошибочного бита при когерентном обнаружении сигнала в дифференциальной модуляции BPSK
4.7.3. Вероятность появления ошибочного бита при когерентном обнаружении сигнала в бинарной ортогональной модуляции FSK
4.7.4. Вероятность появления ошибочного бита при некогерентном обнаружении сигнала в бинарной ортогональной модуляции FSK
4.7.5. Вероятность появления ошибочного бита для бинарной модуляции DPSK
4.7.6. Вероятность ошибки для различных модуляций
4.7.1. Вероятность появления ошибочного бита при когерентном обнаружении сигнала BPSK
Важной мерой производительности, используемой для сравнения цифровых схем модуляции, является вероятность ошибки, РЕ Для коррелятора или согласованного фильтра вычисление РЕ можно представить геометрически (см. рис. 4.6). Расчет РЕ включает нахождение вероятности того, что при данном векторе переданного сигнала, скажем si вектор шума n выведет сигнал из области 1. Вероятность принятия детектором неверного решения называется вероятностью символьной ошибки, рE. Несмотря на то что решения принимаются на символьном уровне, производительность системы часто удобнее задавать через вероятность битовой ошибки (Ps). Связь РВ и РЕ рассмотрена в разделе 4.9.3 для ортогональной передачи сигналов и в разделе 4.9.4 для многофазной передачи сигналов.
Для удобства изложения в данном разделе мы ограничимся когерентным обнаружением сигналов BPSK. В этом случае вероятность символьной ошибки — это то же самое, что и вероятность битовой ошибки. Предположим, что сигналы равновероятны. Допустим также, что при передаче сигнала ![]() принятый сигнал r(t) равен
принятый сигнал r(t) равен ![]() , где n(t) — процесс AWGN; кроме того, мы пренебрегаем ухудшением качества вследствие введенной каналом или схемой межсимвольной интерференции. Как показывалось в разделе 4.4.1, антиподные сигналы
, где n(t) — процесс AWGN; кроме того, мы пренебрегаем ухудшением качества вследствие введенной каналом или схемой межсимвольной интерференции. Как показывалось в разделе 4.4.1, антиподные сигналы ![]() и
и ![]() можно описать в одномерном сигнальном пространстве, где
можно описать в одномерном сигнальном пространстве, где
 (4.74)
(4.74)
Детектор выбирает ![]() с наибольшим выходом коррелятора
с наибольшим выходом коррелятора ![]() ; или, в нашем случае антиподных сигналов с равными энергиями, детектор, используя формулу (4.20), принимает решение следующего вида.
; или, в нашем случае антиподных сигналов с равными энергиями, детектор, используя формулу (4.20), принимает решение следующего вида.
![]() (4.74)
(4.74)
Как видно из рис. 4.9, возможны ошибки двух типов: шум так искажает переданный сигнал ![]() , что измерения в детекторе дают отрицательную величину z(T), и детектор выбирает гипотезу H2, что был послан сигнал s2(t). Возможна также обратная ситуация: шум искажает переданный сигнал
, что измерения в детекторе дают отрицательную величину z(T), и детектор выбирает гипотезу H2, что был послан сигнал s2(t). Возможна также обратная ситуация: шум искажает переданный сигнал ![]() , измерения в детекторе дают положительную величину z(T), и детектор выбирает гипотезу Н1, соответствующую предположению о передаче сигнала
, измерения в детекторе дают положительную величину z(T), и детектор выбирает гипотезу Н1, соответствующую предположению о передаче сигнала ![]() .
.
В разделе 3.2.1.1 была выведена формула (3.42), описывающая вероятность битовой ошибки РB для детектора, работающего по принципу минимальной вероятности ошибки.
 (4.76)
(4.76)
Здесь σ0 — среднеквадратическое отклонение шума вне коррелятора. Функция Q(x), называемая гауссовым интегралом ошибок, определяется следующим образом.
 (4.77)
(4.77)
Эта функция подробно описывается в разделах 3.2 и Б.3.2.
Для передачи антиподных сигналов с равными энергиями, таких как сигналы в формате BPSK, приведенные в выражении (4.74), на выход приемника поступают следующие компоненты: ![]() , при переданном сигнале
, при переданном сигнале ![]() , и
, и ![]() , при переданном сигнале s2(t), где Еь — энергия сигнала, приходящаяся на двоичный символ. Для процесса AWGN дисперсию шума
, при переданном сигнале s2(t), где Еь — энергия сигнала, приходящаяся на двоичный символ. Для процесса AWGN дисперсию шума ![]() вне коррелятора можно заменить N0/2 (см. приложение В), так что формулу (4.76) можно переписать следующим образом.
вне коррелятора можно заменить N0/2 (см. приложение В), так что формулу (4.76) можно переписать следующим образом.
 (4.78)
(4.78)
 (4.79)
(4.79)
Данный результат для полосовой передачи антиподных сигналов BPSK совпадает с полученными ранее формулами для обнаружения антиподных сигналов с использованием согласованного фильтра (формула (3.70)) и обнаружения узкополосных антиподных сигналов с применением согласованного фильтра (формула (3.76)). Это является примером описанной ранее теоремы эквивалентности. Для линейных систем теорема эквивалентности утверждает, что на математическое описание процесса обнаружения не влияет сдвиг частоты. Как следствие, использование согласованных фильтров или корреляторов для обнаружения полосовых сигналов (рассмотренное в данной главе) дает те же соотношения, что были выведены ранее для сопоставимых узкополосных сигналов.
4.7.2. Вероятность появления ошибочного бита при когерентном обнаружении сигнала в дифференциальной модуляции BPSK
Сигналы в канале иногда инвертируются; например, при использовании когерентного опорного сигнала, генерируемого контуром ФАПЧ, фаза может быть неоднозначной. Если фаза несущей была инвертирована при использовании схемы DPSK, как это скажется на сообщении? Поскольку информация сообщения кодируется подобием или отличием соседних символов, единственным следствием может быть ошибка в бите, который инвертируется, или в бите, непосредственно следующим за инвертированным. Точность определения подобия или отличия символов не меняется при инвертировании несущей. Иногда сообщения (и кодирующие их сигналы) дифференциально кодируются и когерентно обнаруживаются, чтобы просто избежать неопределенности в определении фазы.
Вероятность появления ошибочного бита при когерентном обнаружении сигналов в дифференциальной модуляции PSK (DPSK) дается выражением [5].
 (4.80)
(4.80)
Это соотношение изображено на рис. 4.25. Отметим, что существует незначительное ухудшение достоверности обнаружения по сравнению с когерентным обнаружением сигналов в модуляции PSK. Это вызвано дифференциальным кодированием, поскольку любая отдельная ошибка обнаружения обычно приводит к принятию двух ошибочных решений. Подробно вероятность ошибки при использовании наиболее популярной схемы — когерентного обнаружения сигналов в модуляции DPSK — рассмотрена в разделе 4.7.5.
Рис. 4.25. Вероятность появления ошибочного бита для бинарных систем нескольких типов
4.7.3. Вероятность появления ошибочного бита при когерентном обнаружении сигнала в бинарной ортогональной модуляции FSK
Формулы (4.78) и (4.79) описывают вероятность появления ошибочного бита для когерентного обнаружения антиподных сигналов. Более общую трактовку для когерентного обнаружения бинарных сигналов (не ограничивающихся антиподными сигналами) дает следующее выражение для РВ [6].
 (4.81)
(4.81)
Из формулы (3.64,б) ![]() — временной коэффициент взаимной корреляций между
— временной коэффициент взаимной корреляций между ![]() и
и ![]() , где θ — угол между векторами сигналов
, где θ — угол между векторами сигналов ![]() и s2 (см. рис. 4.6). Для антиподных сигналов, таких как сигналы BPSK, θ = π, поэтому ρ = -1.
и s2 (см. рис. 4.6). Для антиподных сигналов, таких как сигналы BPSK, θ = π, поэтому ρ = -1.
Для ортогональных сигналов, таких как сигналы бинарной FSK (BFSK), θ = π/2, поскольку векторы ![]() и s2 перпендикулярны; следовательно, ρ = 0, что можно доказать с помощью формулы (3.64,а), поэтому выражение (4.81) можно переписать следующим образом.
и s2 перпендикулярны; следовательно, ρ = 0, что можно доказать с помощью формулы (3.64,а), поэтому выражение (4.81) можно переписать следующим образом.
 (4.82)
(4.82)
Здесь Q(x) — дополнительная функция ошибок, подробно описанная в разделах 3.2 и Б.3.2. Зависимость (4.82) для когерентного обнаружения ортогональных сигналов BFSK, показанная на рис. 4.25, аналогична зависимости, полученной для обнаружения ортогональных сигналов с помощью согласованного фильтра (формула (3.71)) и узкополосных ортогональных сигналов (униполярных импульсов) с использованием согласованного фильтра (формула (3.73)). В данной книге мы не рассматриваем амплитудную манипуляцию ООК (on-off keying), но соотношение (4.82 применимо к обнаружению с помощью согласованного фильтра сигналов ООК, так же как и к когерентному обнаружению любых ортогональных сигналов.
Справедливость соотношения (4.82) подтверждает и то, что разность энергий между ортогональными векторами сигналов ![]() и s2 с амплитудой
и s2 с амплитудой ![]() , как показано на рис. 3.10, б, равна квадрату расстояния между концами ортогональных векторов Ed = 2Eb. Подстановка этого результата в формулу (3.63) также дает формулу (4.82). Сравнивая формулы (4.82) и (4.79), видим, что, по сравнению со схемой BPSK, схема BFSK требует на 3 дБ большего отношения E/N0 для обеспечения аналогичной достоверности передачи. Этот результат не должен быть неожиданным, поскольку при данной мощности сигнала квадрат расстояния между ортогональными векторами вдвое (на 3 дБ) больше квадрата расстояния между антиподными векторами.
, как показано на рис. 3.10, б, равна квадрату расстояния между концами ортогональных векторов Ed = 2Eb. Подстановка этого результата в формулу (3.63) также дает формулу (4.82). Сравнивая формулы (4.82) и (4.79), видим, что, по сравнению со схемой BPSK, схема BFSK требует на 3 дБ большего отношения E/N0 для обеспечения аналогичной достоверности передачи. Этот результат не должен быть неожиданным, поскольку при данной мощности сигнала квадрат расстояния между ортогональными векторами вдвое (на 3 дБ) больше квадрата расстояния между антиподными векторами.
4.7.4. Вероятность появления ошибочного бита при некогерентном обнаружении сигнала в бинарной ортогональной модуляции FSK
Рассмотрим бинарное ортогональное множество равновероятных сигналов FSK ![]() , определенное формулой (4.8).
, определенное формулой (4.8).
![]()
Фаза φ неизвестна и предполагается постоянной. Детектор описывается М = 2 каналами, состоящими, как показано на рис. 4.19, из полосовых фильтров и детекторов огибающей. На вход детектора поступает принятый сигнал r(t) = si(t) + n(t), где n(i) — гауссов шум с двусторонней спектральной плотностью мощности No/2. Предположим, что ![]() и
и ![]() достаточно разнесены по частоте, чтобы их перекрытием можно было пренебречь. Вычисление вероятности появления ошибочного бита для равновероятных сигналов
достаточно разнесены по частоте, чтобы их перекрытием можно было пренебречь. Вычисление вероятности появления ошибочного бита для равновероятных сигналов ![]() и
и ![]() начнем, как и в случае узкополосной передачи, с уравнения (3.38).
начнем, как и в случае узкополосной передачи, с уравнения (3.38).
 (4.83)
(4.83)
Для бинарного случая тестовая статистика z(T) определена как ![]() . Предположим, что полоса фильтра Wf равна 1/T, так что огибающая сигнала FSK (приблизительно) сохраняется на выходе фильтра. При отсутствии шума в приемнике значение z(T) равно
. Предположим, что полоса фильтра Wf равна 1/T, так что огибающая сигнала FSK (приблизительно) сохраняется на выходе фильтра. При отсутствии шума в приемнике значение z(T) равно ![]() при передаче s1(t) и —
при передаче s1(t) и —![]() — при передаче s2(t). Вследствие такой симметрии оптимальный порог γ0=0. Плотность вероятности
— при передаче s2(t). Вследствие такой симметрии оптимальный порог γ0=0. Плотность вероятности ![]() подобна плотности вероятности
подобна плотности вероятности ![]() .
.
![]() (4.84)
(4.84)
Таким образом, можем записать
 (4.85)
(4.85)
или
![]() (4.86)
(4.86)
где z1 и z2 обозначают выходы z1(T) и z2(T) детекторов огибающей, показанных на рис.4.19. При передаче тона ![]() , т.е. когда r(t) = s2(t) + n(t), выход z1(T) состоит исключительно из случайной переменной гауссового шума; он не содержит сигнального компонента. Распределение Гаусса в нелинейном детекторе огибающей дает распределение Релея на выходе [6], так что
, т.е. когда r(t) = s2(t) + n(t), выход z1(T) состоит исключительно из случайной переменной гауссового шума; он не содержит сигнального компонента. Распределение Гаусса в нелинейном детекторе огибающей дает распределение Релея на выходе [6], так что
 (4.87)
(4.87)
где ![]() — шум на выходе фильтра. С другой стороны, z2(T) имеет распределение Раиса, поскольку на вход нижнего детектора огибающей подается синусоида плюс шум [6]. Плотность вероятности p(z2s2) записывается как
— шум на выходе фильтра. С другой стороны, z2(T) имеет распределение Раиса, поскольку на вход нижнего детектора огибающей подается синусоида плюс шум [6]. Плотность вероятности p(z2s2) записывается как
 (4.88)
(4.88)
где ![]() и, как и ранее,
и, как и ранее, ![]() — шум на выходе фильтра. Функция 10(х), известная как модифицированная функция Бесселя первого рода нулевого порядка [7], определяется следующим образом.
— шум на выходе фильтра. Функция 10(х), известная как модифицированная функция Бесселя первого рода нулевого порядка [7], определяется следующим образом.
 (4.89)
(4.89)
Ошибка при передаче s2(t) происходит, если выборка огибающей z1(T), полученная из верхнего канала (по которому проходит шум), больше выборки огибающей z2(T), полученной из нижнего канала (по которому проходит сигнал и шум). Таким образом, вероятность этой ошибки можно получить, проинтегрировав ![]() до бесконечности с последующим усреднением результата по всем возможным z2.
до бесконечности с последующим усреднением результата по всем возможным z2.
 (4.91)
(4.91)
Здесь ![]() , внутренний интеграл — условная вероятность ошибки, при фиксированном значении z2, если был передан сигнал s2(1), а внешний интеграл усредняет условную вероятность по всем возможным значениям z2. Данный интеграл можно вычислить аналитически [8], и его значение равно следующему.
, внутренний интеграл — условная вероятность ошибки, при фиксированном значении z2, если был передан сигнал s2(1), а внешний интеграл усредняет условную вероятность по всем возможным значениям z2. Данный интеграл можно вычислить аналитически [8], и его значение равно следующему.
 (4.92)
(4.92)
С помощью формулы (1.19) шум на выходе фильтра можно выразить как
![]() (4.93)
(4.93)
где ![]() a Wf — ширина полосы фильтра. Таким образом, формула (4.92) приобретает следующий вид.
a Wf — ширина полосы фильтра. Таким образом, формула (4.92) приобретает следующий вид.
 (4.94)
(4.94)
Выражение (4.94) показывает, что вероятность ошибки зависит от ширины полосы полосового фильтра и РB уменьшается при снижении Wf. Результат справедлив только при пренебрежении межсимвольной интерференцией (intersymbol interference — ISI). Минимальная разрешенная Wf (т.е. не дающая межсимвольной интерференции) получается из уравнения (3.81) при коэффициенте сглаживания г = 0. Следовательно, Wf= R бит/с =1/T, и выражение (4.94) можно переписать следующим образом.
 (4.95)
(4.95)
 (4.96)
(4.96)
Здесь Еь= (1/2)А2Т — энергия одного бита. Если сравнить вероятность ошибки схем некогерентной и когерентной FSK (см. рис. 4.25), можно заметить, что при равных РB некогерентная FSK требует приблизительно на 1 дБ большего отношения Eb/N0, чем когерентная FSK (для РB < 10-4). При этом некогерентный приемник легче реализуется, поскольку не требуется генерировать когерентные опорные сигналы. По этой причине практически все приемники FSK используют некогерентное обнаружение. В следующем разделе будет показано, что при сравнении когерентной ортогональной схемы FSK с нёкогерентной схемой DPSK имеет место та же разница в 3 дБ, что и при сравнении когерентной ортогональной FSK и когерентной PSK. Как указывалось ранее, в данной книге не рассматривается амплитудная манипуляция ООК (on-off keying). Все же отметим, что вероятность появления ошибочного бита РB, выраженная в формуле (4.96), идентична РB для некогерентного обнаружения сигналов ООК.
4.7.5. Вероятность появления ошибочного бита для бинарной модуляции DPSK
Определим набор сигналов BPSK следующим образом.
 (4.97)
(4.97)
Особенностью схемы DPSK является отсутствие в сигнальном пространстве четко определенных областей решений. В данном случае решение основывается на разности фаз между принятыми сигналами. Таким образом, при передаче сигналов DPSK каждый бит в действительности передается парой двоичных сигналов.
 (4.98)
(4.98)
Здесь ![]() обозначает сигнал
обозначает сигнал ![]() , за которым следует сигнал
, за которым следует сигнал ![]() . Первые Т секунд каждого сигнала — это в действительности последние Т секунд предыдущего. Отметим, что оба сигнала s1(t) и s2(t) могут принимать любую из возможных форм и что
. Первые Т секунд каждого сигнала — это в действительности последние Т секунд предыдущего. Отметим, что оба сигнала s1(t) и s2(t) могут принимать любую из возможных форм и что ![]() и
и ![]() — это антиподные сигналы. Таким образом, корреляцию между
— это антиподные сигналы. Таким образом, корреляцию между ![]() и s2(t) для любой комбинации сигналов можно записать следующим образом.
и s2(t) для любой комбинации сигналов можно записать следующим образом.
 (4.99)
(4.99)
Следовательно, каждую пару сигналов DPSK можно представить как ортогональный сигнал длительностью 2Т секунд. Обнаружение может соответствовать некогерентному обнаружению огибающей с помощью четырех каналов, согласованных с каждым возможным выходом огибающей, как показано на рис. 4.26. Поскольку два детектора огибающей, представляющих каждый символ, обратны друг другу, выборки их огибающих будут совпадать. Значит, мы можем реализовать детектор как один канал для ![]() , согласовывающегося с
, согласовывающегося с ![]() или
или ![]() , и один канал для
, и один канал для ![]() , согласовывающегося с
, согласовывающегося с ![]() или
или ![]() , как показано на рис. 4.26. Следовательно, детектор DPSK сокращается до стандартного двухканального некогерентного детектора. В действительности фильтр может согласовываться с разностным сигналом; так что необходимым является всего один канал. На рис. 4.26 показаны фильтры, которые согласовываются с огибающими сигнала (в течение двух периодов передачи символа). Что это означает, если вспомнить, что DPSK — это схема передачи сигналов с постоянной огибающей? Это означает, что нам требуется реализовать детектор энергии, подобный квадратурному приемнику на рис. 4.18, где каждый сигнал в течение периода
, как показано на рис. 4.26. Следовательно, детектор DPSK сокращается до стандартного двухканального некогерентного детектора. В действительности фильтр может согласовываться с разностным сигналом; так что необходимым является всего один канал. На рис. 4.26 показаны фильтры, которые согласовываются с огибающими сигнала (в течение двух периодов передачи символа). Что это означает, если вспомнить, что DPSK — это схема передачи сигналов с постоянной огибающей? Это означает, что нам требуется реализовать детектор энергии, подобный квадратурному приемнику на рис. 4.18, где каждый сигнал в течение периода ![]() представляется синфазным и квадратурным опорными сигналами.
представляется синфазным и квадратурным опорными сигналами.
синфазный опорный сигнал ![]() квадратурный опорный сигнал
квадратурный опорный сигнал ![]() синфазный опорный сигнал
синфазный опорный сигнал ![]() квадратурный опорный сигнал
квадратурный опорный сигнал ![]()
Поскольку пары сигналов DPSK ортогональны, вероятность ошибки при подобном некогерентном обнаружении дается выражением (4.96). Впрочем, поскольку сигналы DPSK длятся 2Т секунд, энергия сигналов ![]() , определенных в формуле (4.98), равна удвоенной энергии сигнала, определенного в течение одного периода передачи символа.
, определенных в формуле (4.98), равна удвоенной энергии сигнала, определенного в течение одного периода передачи символа.
а)
б)
Рис. 4.26. Обнаружение в схеме DPSK: а) четырехканальное дифференциально-когерентное обнаружение сигналов в бинарной модуляции DPSK; б) эквивалентный двухканальный детектор сигналов в бинарной модуляции DPSK
Таким образом, РВможно записать в следующем виде.
 (4.100)
(4.100)
Зависимость (4.100), изображенная на рис. 4.25, представляет собой дифференциальное когерентное обнаружение сигналов в дифференциальной модуляции PSK, или просто DPSK. Выражение справедливо для оптимального детектора DPSK (рис. 4.17, в). Для детектора, показанного на рис. 4.17, б, вероятность ошибки будет несколько выше приведенной в выражении (4.100) [3]. Если сравнить вероятность ошибки, приведенную в формуле (4.100), с вероятностью ошибки когерентной схемы PSK (см. рис. 4.25), видно, что при равных РB схема DPSK требует приблизительно на 1 дБ большего отношения E^N0, чем схема BPSK (для ![]() ). Систему DPSK реализовать легче, чем систему PSK, поскольку приемник DPSK не требует фазовой синхронизации. По этой причине иногда предпочтительнее использовать менее эффективную схему DPSK, чем более сложную схему PSK.
). Систему DPSK реализовать легче, чем систему PSK, поскольку приемник DPSK не требует фазовой синхронизации. По этой причине иногда предпочтительнее использовать менее эффективную схему DPSK, чем более сложную схему PSK.
4.7.6. Вероятность ошибки для различных модуляций
В табл. 4.1 и на рис. 4.25 приведены аналитические выражения и графики РB для наиболее распространенных схем модуляции, описанных выше. Для РB = 10-4 можно видеть, что разница между лучшей (когерентной PSK) и худшей (некогерентной ортогональной FSK) из рассмотренных схем равна приблизительно 4 дБ. В некоторых случаях 4 дБ — это небольшая цена за простоту реализации, увеличивающуюся от когерентной схемы PSK до некогерентной FSK (рис. 4.25); впрочем, в других случаях ценным является даже выигрыш в 1 дБ. Помимо сложности реализации и вероятности РB существуют и другие факторы, влияющие на выбор модуляции; например, в некоторых случаях (в каналах со случайным затуханием) желательными являются некогерентные системы, поскольку иногда когерентные опорные сигналы затруднительно определять и использовать. В военных и космических приложениях весьма желательны сигналы, которые могут противостоять значительному ухудшению качества, сохраняя возможность обнаружения.
Таблица 4.1. Вероятность ошибки для различных бинарных модуляций
|
Модуляция |
PB |
|
PSK (когерентное обнаружение) |
|
|
DPSK (дифференциальное когерентное обнаружение) |
|
|
Ортогональная FSK (когерентное обнаружение) |
|
|
Ортогональная FSK (некогерентное обнаружение) |
|


Pв
– вероятность ошибки зависит от
соотношения «сигнал/шум».
Pв=f(ОСШ)
Д ля
ля
бинарного случая
ОСШ=Eb/No
Eb
– энергия
бита
No
– спектральная
плотность мощности шума
ОСШ=Eb/No=(PS/PN)*(ΔF/C)
PS
– мощность
сигнала
No
– мощность
шума
PS/PN
= 2С/ΔF-1
C=log2(PS/PN+1)
– формула Шеннона.
Для m-мерной
ES=Eblog2M
M-
разрядность системы (сколько уровней
может принимать единичный импульс). ES
– энергия
символа.
В большинстве
формул для определения вероятности
используется функция Крампа


18 Кодирование
Суть
линейного кодирования заключается в
преобразовании последовательности
передаваемых импульсов с целью
уменьшения мощности передатчика и
сужения требуемой полосы частот.
1)
Потенциальный код без возращения к 0
«+»
– простота реализации; хорошая
распознаваемость ошибок (благодоря
наличию 2-х однозначно отличающихся
потенциалов); сравнительно узкий спектр
«-»
– метод не обладает свойством
самосинхронизации; при высоких скоростях
обмена данными или длинных последовательностей
1 или 0 не большое рассогласование
тактовых частот может привести к
некоторому считыванию битов; наличие
низкочастотной составляющей, кот.
приближается к постоянному сигналу
при передачи длинных последовательностей
нулей или единиц.

2)
Биполярное кодирование. бипол-й код
явл. модификацией потенциального с
альтернат-й инверсией. В этом методе
использ-ся 3 уровня потенциала: «0» лог
кодируется 0, «1 лог» код-ся либо
положительным потенц-ом либо отрицат-м
в зависимости от предыдущего значения
1, т.е. каждый послед. потенциал 1
противополож. предыдущему. Этот код
частично решает проблему постоян-й
составл-ей. Длинные последов-ти нулей
характ-ся наличием постоян-й составляющей.
При равномерном потоке 0 и 1 спектр
сигнала более узкий по сравнению с
потенц-м кодом.
3)
Потенциальный код с инверсией используется
2 уровня сигнала при передаче нуля
перед-ся потенциал установ-й в педыдущем
такте. При передаче 1 сигнал инверт-ся
на противоположный. Этот код удобен в
случае если наличие 3-го уровня сигнала
нежел-но. Например в оптич-х системах.
Для улучшения потенц-х кодов испол-ся
2 метода: 1. Основан на добавл-нии в исход-й
код исбыточ-х битов, содерж-х лог. «1». В
этом случае длинные послед-ти 0 прерываются,
исчезает постоя-я составляющ-я, сужает-ся
спектр, однако снижается полезная
пропуск-я способ-ть. 2-й метод основан
на предварительном перемешивании
битового потока, след-но вероят-ть
появл-я 0 и 1 стан-ся практич-ки одинаковой.
4) Биполярный
импульсный код. Данные представлены
фронтом сигнала. «1» — импульс одной
полярности; «0» — другой. «+» — хорошая
самосинхронизирующая способность; «-»
– широкий спектр; наличие постоянной
составляющей при передаче длительной
последовательности импульсов 0 и 1.
19 Сравнение кодов, используемых в каналообразующих устройствах
Основными кодами,
используемыми в коу, являются: NRZ,
AMI,
NRZI,
биполярный импульсный, манчестерский,
2B1Q.
Код NRZ
обладает узким спектром, хорошей
распознаваемостью ошибок и простотой
реализации.
AMI-код
обладает хорошими синхронизирующими
свойствами при передаче серий единиц
и сравнительно прост в реализации.
Недостатком кода является ограничение
на плотность нулей в потоке данных,
поскольку длинные последовательности
нулей ведут к потере синхронизации.
Код NRZI
удобен в тех случаях, когда наличие
третьего уровня сигнала весьма
нежелательно, например в оптических
кабелях, где устройство распознаются
только два сигнала – свет и темнота.
Биполярный
импульсный код обладает отличными
самосинхронизирующими свойствами, но
постоянная составляющая, может
присутствовать, например, при передаче
длинной последовательности единиц или
нулей. Кроме того, спектр у него шире,
чем у потенциальных кодов.
Полоса пропускания
манчестерского
кода уже,
чем у биполярного импульсного. У него
также нет постоянной составляющей, а
основная гармоника в худшем случае (при
передаче последовательности единиц
или нулей) имеет частоту N Гц, а в лучшем
(при передаче чередующихся единиц и
нулей) она равна N/2 Гц, как и у кодов AMI
или NRZ. В среднем ширина полосы
манчестерского кода в полтора раза уже,
чем у биполярного импульсного кода, а
основная гармоника колеблется вблизи
значения 3N/4. Манчестерский код имеет
еще одно преимущество перед биполярным
импульсным кодом. В последнем для
передачи данных используются три уровня
сигнала, а в манчестерском — два.
Сигнальная скорость
у кода 2B1Q
в два раза ниже, чем у кодов NRZ
и AMI,
а спектр сигнала в два раза уже.
Следовательно с помощью 2B1Q-кода
можно по одной и той же линии передавать
данные в два раза быстрее, однако для
его реализации мощность передатчика
должна быть выше, чтобы четыре уровня
четко различались приемником на фоне
помех.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Как разработчика приборов для измерения параметров телевизионных сигналов меня часто спрашивают, как правильно интерпретировать результаты измерений. В настоящее время для специалистов, обслуживающих системы телеприема, доступно большое количество измерительных приборов, а значит, есть возможность количественно оценить качество телевизионных каналов, в том числе каналов с цифровой модуляцией. Однако при интерпретации измеренных величин до сих пор чувствуются неуверенность и сомнения. В этом материале я изложу свою точку зрения на значимость каждого из параметров, характеризующих качество телевизионного сигнала.
Mой взгляд на этот вопрос в основном формировался в процессе собственных разработок и производства телевизионных измерительных приборов. Но свою лепту внесли и консультации со специалистами всемирно известных компаний, производящих подобные приборы, и общение с операторами кабельных сетей.
Должен оговориться, что все нижеизложенное в первую очередь касается цифрового кабельного телевидения стандарта DVBC. Но в силу родственных связей между форматами DVB-вещания мои рассуждения с некоторыми оговорками можно отнести и к DVB-S, DVB-T, и др.
Содержание
- Пять основных параметров
- BER vs MER
- Самый важный параметр
- Время измерения BER
- Преимущества MER
- Констелляционная диаграмма
- Особенности измерения уровня цифровых сигналов
- Общие рекомендации по оценке качества цифровых каналов
- Использованная литература
Пять основных параметров
Для начала рассмотрим набор измеряемых параметров цифровых каналов, доступных владельцам современных приборов. Как правило, эти приборы позволяют измерять пять параметров.
Первый из них — уровень сигнала в канале. Без сомнения, это один из важнейших параметров, характеризующих качество приема. Несмотря на то, что это самый понятный для специалистов параметр и его с достаточной точностью можно измерить даже приборами, предназначенными для аналоговых сигналов, при анализе результатов измерений иногда встречаются неправильные толкования и недопонимания.
Следующий параметр — MER (Modulation Error Ratio), или Коэффициент ошибок модуляции. По своей сути MER близок параметру SNR (сигнал/шум). В некоторых странах вместо параметра MER применяют EVM (Величина вектора ошибки), но по существу это одно и то же, выражаемое в разных единицах.
Третий параметр — BER (Bit Error Ratio), или Коэффициент битовых ошибок. Он характеризует частоту появления ошибочно восстановленных битов в демодулированном потоке данных и для стандарта DVB-C измеряется в двух точках: до декодера РидаСоломона и после него. Поэтому фактически это два параметра, которым часто присваивают названия preBER и postBER. Параметр postBER — та величина, которую пользователю иногда предъявляют как значение счетчика ошибочных пакетов за интервал наблюдения.
Последний параметр — констелляционная диаграмма, которая представляет собой график расположения символов на амплитуднофазовой плоскости, формируемый с накоплением за определенное время. Как правило, диаграмма рассматривается как некий качественный, а не количественный параметр, позволяющий оценить характер искажений входного радиосигнала.
Теперь можно приступить к более подробному анализу каждого из параметров на предмет их важности в оценке качества принимаемого цифрового сигнала.
BER vs MER
В специализированной литературе, журналах и на интернет-форумах часто разгораются дискуссии о значимости этих параметров; нередко можно встретить мнение, что самым важным и информативным параметром является MER. Сторонники этой точки зрения мотивируют ее тем, что зависимость величины MER от уровня шумов в полосе канала носит более пологий характер по сравнению с кривой BER, поэтому можно точнее оценить запас по устойчивому приему сигнала. В этом высказывании есть, конечно, большая доля истины. В самом деле, диапазон измерения MER, как правило, находится в пределах от 26-27 дБ до 38-42 дБ и выше (для модуляции QAM-256). Это позволяет оценить запас по качеству сигнала от порога синхронизации, когда демодулятор только-только начинает восстанавливать сигнал при значении preBER 1E-2…1E-3 . К тому же значение MER, как правило, более стабильно по сравнению с BER, особенно когда BER ниже 1E-7, что объясняется временем усреднения этих величин. К этому обстоятельству я вернусь немного позже.
Mux: MER-ы бывают пиковые и среднеквадратичные. Среднеквадратичные отражают усредненное значение за период измерения, а пиковые — максимальное. Если измеряется среднеквадратичное, то вполне возможны краткие развалы картинок принормальном MER-е, но переход на измерения пикового значения покажут эти сбои.
Mux: Достижимая точность измерения MER тем выше, чем ниже размерность модуляции измеряемого сигнала. Чем больше точек констелляции должен обрисовать ЦАП, тем меньше у него времени на каждую точку. Karlson2k: MER — хороший показатель, однако не единственный. Для приёмника
скорее важен BER или даже PER (BER после декодера Рида-Соломона). Иногда с одними тем же MER могут быть совсем разные BER.
В «обычных» условиях корреляция между MER и BER достаточно чёткая. Действительно, появление BER свидетельствует о подходе к границе (которая для цифры очень тонкая — здесь ещё есть, ещё чуть-чуть и уже совсем нет). Но как раз граница и важна. Тем не менее, в реальной жизни полно условий, когда чёткость корреляции начинает сбивается. Например — частотный сдвиг, из-за допплеровского эффекта (актуально для DVB-H) или по каким-то другим причинам. Иногда сбой может быть вызван «особенностями» передатчиков. Конечно, на BER сложно ориентироваться при измерениях, особенно «быстрых», и в большинстве случаев достаточно на MER. Но при любых важных измерениях без BER не обойтись.
А на практике для бытовых приёмников важен еще и уровень сигнала. К сожа- лению, разница в минимальном уровне, при котором бытовой приёмник цепляется за сигнал, доходит до 30-35 дБ у разных моделей даже от одного производителя. Штампуется же всё «подешевле». То есть на что ориентироваться при постройке
сети — вопрос ещё тот .
Самый важный параметр
Тем не менее, берусь утверждать, что самый важный параметр из всех измеряемых для цифрового сигнала — BER, а точнее — postBER. Ведь уверенно заявлять, что восстановление потока, полученного за определенный период, было абсолютным, можно только в случае, если postBER за это время оказался равным нулю. В реальности значение для postBER, равное 1E10…1E11, говорит о частоте появления ошибки в восстановленном потоке данных не более 2…20 бит в час. Такой прием можно характеризовать как безошибочный. В соответствии с научной терминологией соответствующий поток данных можно назвать «квазисвободным от ошибок».
У BER есть, правда, один недостаток — невозможность оценить запас сигнала по качеству, за счет которого можно уверенно принимать и восстанавливать цифровой поток в течение длительного времени. В пороговой ситуации уменьшение значения MER для одного канала всего на 1-2 дБ может изменить ситуацию от полного восстановления данных к полной невозможности приема сигнала на этом канале и скачкообразному изменению значения BER.
Но, тем не менее, важность этого параметра весьма высока. Особенно он может быть полезен сторонникам контроля телевизионного изображения. Параметр postBER полностью заменяет контроль картинки за исключением того случая, когда в структуре транспортного потока MPEG присутствуют ошибки, приводящие к артефактам изображения. Но они не всегда приводят к дефектам картинки, заметным на экране монитора, или же искажениям звукового сопровождения, да и вообще появляются достаточно редко.
Зато postBER по сравнению с контролем изображения имеет несколько преимуществ. Во-первых, он показывает общее количество ошибок в транспортном потоке, а не на одной программе, как при контроле картинки.
Во-вторых, вычислению postBER никак не препятствует шифровка потоков системами условного доступа. И для открытых, и для закрытых каналов он вычисляется одинаково.
И, в-третьих, postBER более чувствителен к ошибкам: счетчик невосстановленных пакетов будет неумолимо увеличиваться с каждой следующей ошибкой, хотя «битый» пакет может принадлежать другой программе или вообще не оказывать влияния на картинку или звук и, как результат, будет пропущен при визуальном контроле.
С точки зрения оценки запаса по качеству сигнала более информативен, конечно, preBER. Общеизвестно, что пороговое значение preBER, равное 2E-4, дает возможность восстанавливать данные до требуемых 1E-10…1E-11 значения postBER. Но это как раз тот случай, когда мы находимся на границе между уверенным приемом и отсутствием возможности восстановить сигнал при ухудшении значения MER. Если при измерении параметров мы получаем значение preBER, скажем, 1E-6, это уже указывает на наличие некоего запаса, позволяющего нам быть увереннее в будущем.
Время измерения BER
Большинство приборов для измерения параметров сигналов с цифровой модуляцией имеют нижнюю границу диапазона измерения параметра BER 1E-8 или 1E-9, реже — 1E-10, 1E-11. Совершенно естественно, что пользователи приборов хотят иметь границу как можно ниже, а результат измерения получать как можно быстрее. Давайте посчитаем: если мы используем модуляцию QAM-256 и символьную скорость 6,9 Мбод, то битовая скорость на входе декодера РидаСоломона будет составлять 6,9*8=55,2 Мбит/с. Если вероятность появления ошибки 1E-8, то для измерения этой величины нам надо накопить 108 бит потока данных, из которых один бит будет ошибочным. А накапливать мы их будем в течение 108/55,2×106 = 1,8 с. То есть один неправильно декодированный бит будет появляться, в среднем, раз в две секунды.
Результат, измеренный за этот промежуток времени, будет, конечно, весьма неточным. Для уменьшения случайной погрешности необходимо его усреднить хотя бы за 10 периодов измерения, то есть за 18 секунд. Если мы захотим измерить BER с нижней границей 1E-9, то для этого нам потребуется в 10 раз больше времени: 180 секунд или 3 минуты, а для получения достоверного результата 1E-11 мы должны ждать пять часов! Если использовать модуляцию более низкого порядка или более низкую символьную скорость, время измерения увеличится еще больше
Преимущества MER
MER (Modulation Error Ratio) — это ошибка модуляции, характеризующая отклонение реального символа от местоположения символа идеального на констелляционной диаграмме1.
По сравнению с BER параметр MER предоставляет более оперативную информацию о сигнале. Как я уже упоминал, MER является подобием параметра отношения сигнал/шум, хотя и учитывает большее число факторов, искажающих исходный радиосигнал. Значение параметра так же усредняется по времени, как и все величины, связанные с измерением мощности, но его измерение производится для каждого символа и, учитывая большие символьные скорости, накопление за одну секунду дает достаточно достоверный результат.
Вторым достоинством параметра MER является возможность его измерения с нормированной точностью. Большинство современных микросхем декодеров, на основе которых производятся приборы, позволяют вычислять MER аппаратно или на основе величин амплитуд векторов I и Q.
Под аппаратным вычислением я имею в виду возможность получения среднеквадратичного значения вектора ошибки из одного из внутренних регистров демодулятора. Во всяком случае производители микросхем утверждают, что это именно оно, и измерения, в принципе, это подтверждают. А зная среднеквадратичное значение вектора ошибки, вычислить MER уже несложно.
Использование значений амплитуд векторов квадратур для этих целей часто менее пригодно, потому что от микросхемы можно получить лишь 7 или 8 двоичных разрядов амплитуды QIвекторов. В результате динамический диапазон расчетного значения MER получается весьма низок. А разрядность регистра ошибки, напротив, часто бывает 10-, а то и 16-битная.
Погрешность измерения, связанную с неидеальными параметрами тюнера и демодулятора, можно скорректировать, имея источник сигнала с калиброванным параметром сигнал/шум. Калибровка производится для входного сигнала с добавлением только белого шума, но такой метод, тем не менее, дает весьма хороший результат.
Поэтому погрешность параметра MER для многих приборов является нормированной величиной в отличие от BER. Точность измерения BER зависит от качества приемника и демодулятора прибора, и корректировать ее невозможно. В результате измерение BER разными приборами дает близкие значения при плохом и заметно различающиеся при хорошем (при больших значениях MER).
То есть более качественный прибор показывает более низкие (более близкие к реальным) значения BER. Способность измерять низкие значения BER является хорошим индикатором качества измерительного прибора.
Если это так, возникает вопрос: «А не достаточно ли измерять один только MER для оценки качества принимаемого сигнала, ведь время измерения небольшое. Параметр предоставляет комплексную и точную информацию. С этим можно согласиться, но только в одном случае, когда к исходному сигналу примешивается только белый гауссовский шум. Как показывают практика и тестовое моделирование, при выполнении этого условия MER совпадает с SNR, и поэтому в данном случае для определения значений preBER и postBER можно воспользоваться кривыми зависимости BER от отношения SNR входного сигнала.
Констелляционная диаграмма
К сожалению, в реальной жизни все далеко не так идеально. На пути доставки телевизионного сигнала от источника до конечного пользователя существует великое множество факторов, приводящих к искажению сигнала. В результате для определения качества сигнала все-таки приходится использовать все возможные параметры, в том числе констелляционную диаграмму.
ассмотрим подробнее процесс демодуляции сигнала с цифровой модуляцией. После синхронизации с входным сигналом на выходе блока демодулятора для каждого символа появляются два значения векторов I и Q.2 Пара векторов определяет точку на амплитуднофазовой плоскости, каждая из которых принадлежит одной клетке, определяющей конкретное значение символа. В идеальном случае точки ложатся точно в середины клеток.
В условиях воздействия шума точки получают некоторое смещение от ожидаемого положения, которое носит название вектора выходной ошибки. Если точка остается в пределах своей клетки, демодулятор принимает правильное решение, в противном случае символу присваивается значение соседней клетки, что к появлению ошибки во входном потоке данных. Добавление белого шума к входному сигналу приводит к «размазыванию» точки в пятно круглой формы (рис. 1). Наибольшая частота попадания точки — в центре, а к краю окружности она уменьшается. В этом случае все пятна имеют примерно одинаковый диаметр.
Теперь рассмотрим случай одновременного воздействия белого и фазового шумов на демодуляцию сигнала. На рис. 2 приведена констелляционная диаграмма для сигнала с добавлением паразитной фазовой модуляции (джиттер фазы), из которой видно, что фазовая модуляция приводит к большему отклонению точек от центра клетки с увеличением длины вектора. В результате вероятность возникновения ошибки при декодировании точек в углах констелляционной диаграммы резко увеличивается. При этом значение MER уменьшается не так сильно, потому как смещение для точек ближе к центру диаграммы незначительное.
Ситуация ухудшается еще сильнее в случае, если кроме фазовой модуляции присутствует компрессия сигнала, появившаяся при прохождении им активных устройств в зоне нелинейности их передаточной характеристики. Вершины длинных векторов смещаются к центру констелляционной диаграммы, в результате чего вероятность ошибок для этих векторов увеличивается еще значительнее. На значение MER такие искажения также не оказывают большого влияния.
Ниже приведены результаты моделирования трех перечисленных ситуаций: измерение сигнала QAM-256 в случае воздействия только белого шума, белого шума и фазовой модуляции и белого шума одновременно с компрессией амплитуды сигнала. Три соответствующие констелляционных диаграммы представлены на рис. 3.
На следующей диаграмме (рис. 4) представлены три кривые зависимости параметра BER при изменении отношения сигнал/шум во входном сигнале. Синяя линия соответствует первому случаю, когда во входном сигнале присутствует только белый шум, фиолетовая — белый шум и фазовая модуляция и, наконец, зеленая — белый шум и компрессия.
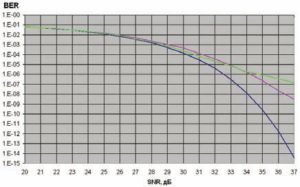
Рис. 4. Кривые зависимости параметра BER при изменении отношения сигнал/шум во входном сигнале
Видно, что при низких значениях сигнал/шум линии практически совпадают, но с увеличением параметра они начинают расходиться. Наконец, на последнем графике (рис. 5) приведена зависимость параметра MER при тех же условиях. Из графика видно: при соотношении сигнал/шум 36 дБ при добавления фазовой модуляции к входному сигналу MER уменьшается на 0,5 дБ, при этом значение BER ухудшается сразу на несколько порядков. Еще сильнее влияние компрессии, хотя она и едва различима на констелляционной диаграмме.
Это не единственные случаи искажения в исходном входном сигнале, которые приводят к сильному ухудшению BER при незначительном изменении значения MER. К аналогичным последствиям приводят фазовые искажения квадратур, амплитудный разбаланс векторов квадратур и т.д.
Правда, последние виды искажений возникают реже. Гораздо хуже ситуация с помехой импульсного характера. Такого рода искажения сигнала не редкость, поскольку существует большое количество устройств, излучающих радиосигнал, который может
выступать в роли импульсной помехи для cигнала телевизионного.
При достаточно низкой частоте повторения и короткой длительности такая помеха практически не влияет на значение MER, но при этом может приводить к полной деградации BER. Ситуация осложняется тем, что подобную помеху сложно обнаружить. Часто не помогает и анализатор спектра. К примеру, если мешающий сигнал находится в полосе канала и при этом меньше по мощности на 20-30 дБ, то он маскируется полезным сигналом.
Особенности измерения уровня цифровых сигналов
Пожалуй, самым понятным для цифровых ТВсигналов, как и для аналогового телевидения, является параметр, характеризующий мощность сигнала. Но, тем не менее, довольно часто возникают вопросы, связанные с определением уровня цифровых каналов, поэтому немного внимания уделим и этому параметру.
Для аналогового телевидения измеряется уровень напряжения радиосигнала несущей частоты изображения. Для цифрового ТВ — «мощность радиосигнала в полосе канала» (такое название часто применяется в зарубежной литературе) или «фактический уровень напряжения радиосигналов с цифровой модуляцией в полосе частот распределения радиосигналов», как он называется в российском ГОСТ Р 52023 — «Сети распределительных систем кабельного телевидения». В России параметр принято обычно измерять в дБ относительно 1 микровольта (дБмкВ) как для аналоговых, так и для цифровых каналов.
Мощность3 радиосигнала для цифровых каналов измеряется как уровень напряжения немодулированного сигнала, который на нагрузке 75 Ом рассеивает мощность, эквивалентную мощности сигнала измеряемого канала.
При измерении уровней сигналов с помощью специализированных телевизионных измерителей или универсальных анализаторов спектра следует учитывать, что в аналоговых каналах характер сигнала — узкополосный, то есть основная часть мощности канала сосредоточена в довольно узком частотном диапазоне, а цифровые каналы характеризуются равномерным распределением мощности в полосе канала. В основе работы измерителей уровня лежит принцип селективного вольтметра. То есть в спектре радиосигнала выделяется (отфильтровывается) определенная частотная полоса, а затем измеряется напряжение сигнала, попавшего в эту полосу.
Если при измерении уровня узкополосного сигнала ширина его спектра заведомо меньше полосы измерения4, уровень измеряемого сигнала будет постоянным при изменении полосы измерения в пределах канала. Ситуация меняется при измерении широкополосных сигналов, каковыми являются радиосигналы цифрового телевидения. В этом случае чем шире полоса измерения прибора, тем выше уровень измеряемого напряжения. На рис. 6 представлена спектрограмма частотного диапазона с несколькими телевизионными каналами с аналоговой и цифровой модуляциями.
Спектрограмма была снята с помощью прибора с полосой измерения 230 кГц. На первый взгляд, уровни цифровых каналов ниже аналоговых более чем на 10 дБ. Однако для аналогового канала S20 уровень (Uan) можно определить по спектру как 66 дБмкВ. А для определения мощности сигнала цифрового канала S23 необходимо применить следующую формулу:
Uцк = Uизм + 10lg(Вц/Виз) + К,5
где Uцк — искомая мощность цифрового канала;
Uизм — уровень напряжения измеренный в центре полосы канала; Вц — полоса частот, занимаемая цифровым каналом; Виз — полоса измерения прибора;
К — поправочный коэффициент, компенсирующий погрешности измерения6.
Подставив исходные данные в формулу, получим:
US23 = 53 + 10lg(7,5/0,23) + 1 = 69 дБмкВ.
Таким образом, на самом деле уровень мощности канала S23 на 3 дБ больше, чем S20.
В режиме измерения уровня специализированные телевизионные приборы автоматически производят такой пересчет цифровых каналов с учетом их полосы и отображают их мощность корректно. Но при работе в режиме анализатора спектра и при измерении приборами, не рассчитанными на работу с цифровыми каналами, надо помнить об этой особенности. Такой метод измерения мощности канала в одной частотной точке дает достаточно точный результат только в случае достаточной равномерности АЧХ в полосе канала.
Общие рекомендации по оценке качества цифровых каналов
Кабельные операторы, давно работающие с цифровым телевидением и имеющие большой опыт, советуют классифицировать состояние кабельной сети по трехбалльной шкале. Оценка три балла означает, что параметры каналов в сети соответствуют требованиям качественного приема и обладают достаточным запасом для стабильной, долговременной работы. От оператора при этом требуется только продолжение текущего контроля. Оценка два балла: параметры каналов также соответствуют требованиям качественного приема, но их значения не имеют достаточного запаса для обеспечения долговременной стабильной работы.
Такое состояние сети требует от оператора планового проведения работ для выявления источника проблем и принятия решения о методах восстановления состояния сети до трех баллов. И, наконец, третье состояние сети с оценкой один балл: параметры одного или нескольких каналов не отвечают требованиям качественного приема, что требует от оператора немедленных действий по ремонту или настраиванию сети для поднятия до второго или третьего уровня. Для оценки каждого канала необходимо измерить все параметры на абонентском отводе. Оценка присваивается в соответствии со следующими условиями.
Оценка 3 балла (выполняются все четыре условия): Уровень канала: соответствует расчетному уровню для данной точки сети с учетом неравномерности и принятой разницы между уровнями аналоговых и цифровых каналов.
MER: не меньше 36 дБ для модуляции QAM-256 и 28 дБ для модуляции QAM-64.
PreBER не превышает 1E7. PostBER: не превышает 1E9.
Оценка 2 балла (выполняются все четыре условия): Уровень канала: соответствует расчетному уровню для данной точки сети с учетом неравномерности и принятой разницы между уровнями аналоговых и цифровых каналов.
MER: находится в пределах от 34 до 36 дБ для модуляции QAM256 и от 26 до 28 дБ для модуляции QAM64.
PreBER: не превышает 1E6. PostBER: не превышает 1E9.
Оценка 1 балл (выполняется хотя бы одно условие):
Уровень канала: не соответствует расчетному уровню для данной точки сети с учетом неравномерности и принятой разницы между уровнями аналоговых и цифровых каналов.
MER: значение меньше 34 дБ для модуляции QAM-256 и меньше 26 дБ для модуляции QAM-64.
PreBER: значение выше 1E6. PostBER: значение выше 1E-9.
Если есть возможность контроля констелляционной диаграммы, необходимо добавить еще одно условие. Для оценки «3» форма констелляционной диаграммы не должна содержать ярко выраженных фазовых искажений, дисбаланса квадратур и искажений типа компрессии сигнала. При наличии подобных искажений измеряемому каналу должна быть присвоена оценка не выше двух баллов.
При указании значений параметров я исходил из предположения, что они измерены корректно, в пределах погрешности измерения прибора. Но при определенных условиях измеренные значения могут выпадать за пределы погрешности. В этом случае каналу может быть присвоена оценка, не соответствующая действительности.
Данная методика оценки качества не является, конечно, абсолютной и единственно верной. Каждый оператор может для себя выбрать границы значений параметров для оценки качества сигнала в соответствии с особенностями конкретной сети и отдельных каналов; при этом следует придерживаться общего подхода к методу проверки состояния сети.
——
1 Физический смысл этого параметра и формула для вычисления его среднеквадратичного значения рассмотрены в статьях серии «Цифровое кабельное ТВ. Часть 2. Состав головной станции, расчет ретранслируемого потока», «ТелеСпутник», ноябрь 2007 и «Цифровое кабельное ТВ. Часть 4. Сигнал DVB в распределительной сети. Использование альтернативных стандартов», январь 2008 (прим. ред.).
2 I= A cosφ, а Q = A sinφ где А – амплитуда QAM символа, а φ – фаза символа.
3 Имеется в виду мощностная характеристика, в качестве которой в телевидении принято использовать эквивалентное напряжение немодулированного сигнала, который по мощности равен сигналу телевизионному. Хотя в статье применяется термин «мощность цифрового канала», на самом деле подразумевается как раз напряжение этого эквивалентного сигнала (прим. автора).
4 Полоса измерения определяется полосой пропускания измерительного фильтра (прим. ред.).
5 Так эта формула выглядит в ГОСТ Р 52023 (прим. автора).
6 Коэффициент зависит в основном от параметров детектора (тип детектора и его постоянные времени) и прямоугольности измерительного фильтра. Определяется опытным путем и, как правило, составляет 13 дБ (прим. автора).
Андрей Конорев,
ведущий инженер ООО «Планар»
Использованная литература
- Б.А. Локшин. Цифровое вещание: — от студии к телезрителю.
- ГОСТ Р 52023-2003 «Сети распределительные систем кабельного телевидения».
- ETSI TR 101 290 Measurement guidelines for DVB system.
В цифровой передаче , количество битовых ошибок является количеством принятых бит одного потока данных над каналом связи , которые были изменены из — за шум , помехи , искажений или битой синхронизацию ошибок.
Коэффициент битовых ошибок ( BER ) — это количество битовых ошибок в единицу времени. Коэффициент битовых ошибок (также BER ) — это количество битовых ошибок, деленное на общее количество переданных битов за исследуемый интервал времени. Коэффициент битовых ошибок — это безразмерная мера производительности, часто выражаемая в процентах .
Бита вероятность ошибка р е является ожидаемым значением коэффициента ошибок по битам. Коэффициент битовых ошибок можно рассматривать как приблизительную оценку вероятности битовых ошибок. Эта оценка точна для длительного интервала времени и большого количества битовых ошибок.
Пример
В качестве примера предположим, что эта переданная битовая последовательность:
0 1 1 0 0 0 1 0 1 1
и следующая полученная битовая последовательность:
0 0 1 0 1 0 1 0 0 1,
Количество битовых ошибок (подчеркнутые биты) в этом случае равно 3. BER — это 3 неверных бита, разделенных на 10 переданных битов, в результате чего BER составляет 0,3 или 30%.
Коэффициент ошибок пакета
Коэффициент ошибок пакетов (PER) — это количество неправильно принятых пакетов данных, деленное на общее количество принятых пакетов. Пакет объявляется некорректным, если хотя бы один бит ошибочен. Ожидаемое значение PER обозначается вероятностью ошибки пакета p p , которая для длины пакета данных N бит может быть выражена как
-
,
предполагая, что битовые ошибки не зависят друг от друга. Для малых вероятностей битовых ошибок и больших пакетов данных это примерно
Подобные измерения могут быть выполнены для передачи кадров , блоков или символов .
Факторы, влияющие на BER
В системе связи на BER на стороне приемника могут влиять шум канала передачи , помехи , искажения , проблемы битовой синхронизации , затухание , замирания из-за многолучевого распространения беспроводной связи и т. Д.
BER может быть улучшен путем выбора сильного уровня сигнала (если это не вызывает перекрестных помех и большего количества битовых ошибок), путем выбора медленной и надежной схемы модуляции или схемы линейного кодирования , а также путем применения схем канального кодирования , таких как избыточные коды прямого исправления ошибок. .
КОБ передачи является количество обнаруженных битов , которые являются неправильными до коррекции ошибок, разделенных на общее количество переданных битов ( в том числе избыточных кодов ошибок). Информация КОБ , примерно равна вероятности ошибки декодирования , это число декодированных битов , которые остаются неправильно после коррекции ошибок, деленное на общее число декодированных битов (полезная информация). Обычно BER передачи больше, чем BER информации. На информационный BER влияет сила кода прямого исправления ошибок.
Анализ BER
BER можно оценить с помощью стохастического ( Монте-Карло ) компьютерного моделирования. Если предполагается простая модель канала передачи и модель источника данных , BER также может быть вычислен аналитически. Примером такой модели источника данных является источник Бернулли .
Примеры простых моделей каналов, используемых в теории информации :
- Двоичный симметричный канал (используется при анализе вероятности ошибки декодирования в случае непакетных битовых ошибок в канале передачи)
- Канал аддитивного белого гауссова шума (AWGN) без замирания.
Наихудший сценарий — это полностью случайный канал, в котором шум полностью преобладает над полезным сигналом. Это приводит к BER передачи 50% (при условии, что предполагается источник двоичных данных Бернулли и двоичный симметричный канал, см. Ниже).
В канале с шумом BER часто выражается как функция нормированного показателя отношения несущей к шуму, обозначаемого Eb / N0 (отношение энергии на бит к спектральной плотности мощности шума) или Es / N0 (энергия на символ модуляции для спектральная плотность шума).
Например, в случае QPSK модуляции и канал АБГШ, КОБ в зависимости от Eb / N0 определяется по формуле:
.
Люди обычно строят кривые BER для описания производительности цифровой системы связи. В оптической связи обычно используется зависимость BER (дБ) от принимаемой мощности (дБм); в то время как в беспроводной связи используется BER (дБ) по сравнению с SNR (дБ).
Измерение коэффициента ошибок по битам помогает людям выбрать подходящие коды прямого исправления ошибок. Поскольку большинство таких кодов исправляют только перевороты битов, но не вставки или удаления битов, метрика расстояния Хэмминга является подходящим способом измерения количества битовых ошибок. Многие кодеры FEC также непрерывно измеряют текущий BER.
Более общий способ измерения количества битовых ошибок — это расстояние Левенштейна . Измерение расстояния Левенштейна больше подходит для измерения характеристик сырого канала перед кадровой синхронизацией , а также при использовании кодов коррекции ошибок, предназначенных для исправления вставки и удаления битов, таких как коды маркеров и коды водяных знаков.
Математический проект
BER — это вероятность неправильной интерпретации из-за электрического шума . Рассматривая биполярную передачу NRZ, мы имеем
для «1» и для «0». Каждый из и имеет период .
Зная, что шум имеет двустороннюю спектральную плотность ,
является
и есть .
Возвращаясь к BER, у нас есть вероятность неправильного толкования .
и
где — порог принятия решения, установленный в 0, когда .
Мы можем использовать среднюю энергию сигнала, чтобы найти окончательное выражение:
± §
Проверка коэффициента битовых ошибок
BERT или тест на частоту ошибок по битам — это метод тестирования схем цифровой связи, в котором используются заранее определенные шаблоны нагрузки, состоящие из последовательности логических единиц и нулей, сгенерированных генератором тестовых шаблонов.
BERT обычно состоит из генератора тестовых шаблонов и приемника, который может быть настроен на один и тот же шаблон. Их можно использовать парами, по одному на любом конце линии передачи, или по отдельности на одном конце с кольцевой проверкой на удаленном конце. BERT обычно представляют собой автономные специализированные инструменты, но могут быть основаны на персональном компьютере . При использовании количество ошибок, если таковые имеются, подсчитывается и представляется в виде отношения, например 1 на 1 000 000 или 1 на 1e06.
Распространенные типы стресс-паттернов BERT
- PRBS ( псевдослучайная двоичная последовательность ) — псевдослучайный двоичный секвенсор из N бит. Эти последовательности шаблонов используются для измерения джиттера и глаз-маски TX-данных в электрических и оптических каналах передачи данных.
- QRSS (квазислучайный источник сигнала) — псевдослучайный двоичный секвенсор, который генерирует каждую комбинацию 20-битного слова, повторяет каждые 1048 575 слов и подавляет последовательные нули не более чем до 14. Он содержит последовательности с высокой плотностью, последовательности с низкой плотностью, и последовательности, которые меняются от низкого к высокому и наоборот. Этот шаблон также является стандартным шаблоном, используемым для измерения джиттера.
- 3 из 24 — шаблон содержит самую длинную строку последовательных нулей (15) с самой низкой плотностью (12,5%). Этот шаблон одновременно подчеркивает минимальную плотность единиц и максимальное количество последовательных нулей. Формат кадра D4 3 из 24 может вызвать желтый аварийный сигнал D4 для цепей кадра в зависимости от выравнивания одного бита с кадром.
- 1: 7 — Также упоминается как 1 из 8 . Он имеет только один в восьмибитной повторяющейся последовательности. Этот шаблон подчеркивает минимальную плотность 12,5% и должен использоваться при тестировании средств, установленных для кодирования B8ZS, поскольку шаблон 3 из 24 увеличивается до 29,5% при преобразовании в B8ZS.
- Мин. / Макс. — последовательность быстрого перехода узора с низкой плотности на высокую. Наиболее полезно при усилении функции ALBO ретранслятора .
- Все единицы (или отметка) — шаблон, состоящий только из единиц. Этот шаблон заставляет повторитель потреблять максимальное количество энергии. Если постоянный ток к ретранслятору отрегулирован должным образом, ретранслятор не будет иметь проблем с передачей длинной последовательности. Этот образец следует использовать при измерении регулирования мощности диапазона. Шаблон «все единицы без рамки» используется для обозначения AIS (также известного как синий сигнал тревоги ).
- Все нули — шаблон, состоящий только из нулей. Это эффективно при поиске оборудования, неправильно настроенного для AMI , такого как низкоскоростные входы мультиплексного волокна / радио.
- Чередование нулей и единиц — шаблон, состоящий из чередующихся единиц и нулей.
- 2 из 8 — шаблон содержит не более четырех последовательных нулей. Он не вызовет последовательность B8ZS, потому что для подстановки B8ZS требуется восемь последовательных нулей. Схема эффективна при поиске оборудования, не использованного для B8ZS.
- Bridgetap — разветвления моста в пределах пролета можно обнаружить с помощью ряда тестовых шаблонов с различной плотностью единиц и нулей. Этот тест генерирует 21 тестовую таблицу и длится 15 минут. Если возникает ошибка сигнала, на участке может быть один или несколько ответвлений моста. Этот шаблон эффективен только для участков T1, которые передают необработанный сигнал. Модуляция, используемая в пролетах HDSL, сводит на нет способность шаблонов моста обнаруживать ответвления моста.
- Multipat — этот тест генерирует пять часто используемых тестовых шаблонов, позволяющих проводить тестирование диапазона DS1 без необходимости выбирать каждый тестовый шаблон отдельно. Шаблоны: все единицы, 1: 7, 2 из 8, 3 из 24 и QRSS.
- T1-DALY и 55 OCTET — Каждый из этих шаблонов содержит пятьдесят пять (55) восьмибитовых октетов данных в последовательности, которая быстро изменяется между низкой и высокой плотностью. Эти паттерны используются в основном для нагрузки на схему ALBO и эквалайзера, но они также усиливают восстановление синхронизации. 55 OCTET имеет пятнадцать (15) последовательных нулей и может использоваться только без рамки без нарушения требований к плотности. Для сигналов с фреймами следует использовать шаблон T1-DALY. Оба шаблона вызовут код B8ZS в схемах с опцией для B8ZS.
Тестер коэффициента битовых ошибок
Тестер коэффициента ошибок по битам (BERT), также известный как «тестер коэффициента ошибок по битам» или решение для тестирования коэффициента ошибок по битам (BERT), представляет собой электронное испытательное оборудование, используемое для проверки качества передачи сигнала отдельных компонентов или целых систем.
Основные строительные блоки BERT:
- Генератор шаблонов , который передает определенный тестовый шаблон в ИУ или тестовую систему.
- Детектор ошибок, подключенный к DUT или тестовой системе, для подсчета ошибок, генерируемых DUT или тестовой системой.
- Генератор тактовых сигналов для синхронизации генератора шаблонов и детектора ошибок
- Анализатор цифровой связи не является обязательным для отображения переданного или принятого сигнала.
- Электрооптический преобразователь и оптико-электрический преобразователь для проверки сигналов оптической связи.
Смотрите также
- Пакетная ошибка
- Код исправления ошибок
- Секунда с ошибкой
- Частота ошибок Витерби
использованная литература
![]() Эта статья включает материалы, являющиеся общественным достоянием, из документа Управления общих служб : «Федеральный стандарт 1037C» .(в поддержку MIL-STD-188 )
Эта статья включает материалы, являющиеся общественным достоянием, из документа Управления общих служб : «Федеральный стандарт 1037C» .(в поддержку MIL-STD-188 )
внешние ссылки
- QPSK BER для канала AWGN — онлайн-эксперимент